
Documents Live, a web authoring and publishing system
Documents Live, a web authoring and publishing system
If you see this, something is wrong
First published on Saturday, Jul 6, 2024 and last modified on Thursday, Apr 10, 2025
Mathedu SAS
We shall now discover and use important ordered sets if vectors, the ones that constitute a basis of the plane.
A basis in \( \mathbb{P}\) is a generalisation of the canonical basis \( (\overrightarrow{i},\overrightarrow{j})\) .
We may define, as for the canonical basis, the cartesian coordinates of any vector in that basis.
Consider the canonical basis \( (\overrightarrow{i},\overrightarrow{j})\) in the vector plane \( \mathbb{P}\) .
Then it is indeed a basis of , because it is an ordered set:
that is linearly independent:
\( \forall\;(a,b)\in\mathbb{R}^2,\;\;a\overrightarrow{i}+b\overrightarrow{j}=\overrightarrow{0}\Rightarrow a=b=0\) ,
and that is spanning for the vector plane :
\( \forall\;\overrightarrow{u}\in\mathbb{P},\;\;\exists\; (a,b)\in\mathbb{R}^2|\; \overrightarrow{u}=a\overrightarrow{i}+b\overrightarrow{j}\)
In the last item, \( a\) and \( b\) are the coordinates of \( \overrightarrow{u}\) in the canonical basis.
Definition 1
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\in\mathbb{P}^n\) are vectors, and consider the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\) .
Then the following definitions are given.
\( S\) is linearly independent if and only if the only linear combination of the elements of \( S\) that is equal to the null vector is the one wirh all coefficients equal to\( 0\) :
\( \forall\;(a_1,a_2…,a_n)\in\mathbb{R}^n\;\; a_1\overrightarrow{u}_1+a_2\overrightarrow{u}_2+…+ a_n\overrightarrow{u}_n=\overrightarrow{0} \Rightarrow a_1=a_2=…=a_n=0\)
And \( S\) is linearly dependent if and only if it is not linearly independent.

Assume that \( \overrightarrow{u}\in\mathbb{P}^{*}\) is a non zero vector.
Then, as \( \overrightarrow{u}=\overrightarrow{0}\) implies \( a=0\) , the ordered set \( S=(\overrightarrow{u})\) is linearly independent.
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\in(\mathbb{P}^*)^2\) are non aligned non zero vectors.
Then, assume that \( a_1\overrightarrow{u}_1+a_2\overrightarrow{u}_2=\overrightarrow{0}\) for some \( (a_1,a_2)\) that are not zero together.
Let’s say that \( a_{2}\ne 0\) , so that \( \overrightarrow{u}_2=\frac{a_{1}}{a_{2}}\overrightarrow{u}_1\) .
That would imply that \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) are aligned, on the contrary of the hypothesis.
Consequently, the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is linearly independent.

Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\in(\mathbb{P}^*)^2\) are aligned non zero vectors.
Consider the coefficient \( k\in\mathbb{R}^*\) such that \( \overrightarrow{u}_2=k\overrightarrow{u}_1\) .
Then \( a_1\overrightarrow{u}_1+a_2\overrightarrow{u}_2=\overrightarrow{0}\) for \( a_{1}=k\) and \( a_{2}=-1\ne 0\) .
Consequently, the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is linearly dependent.
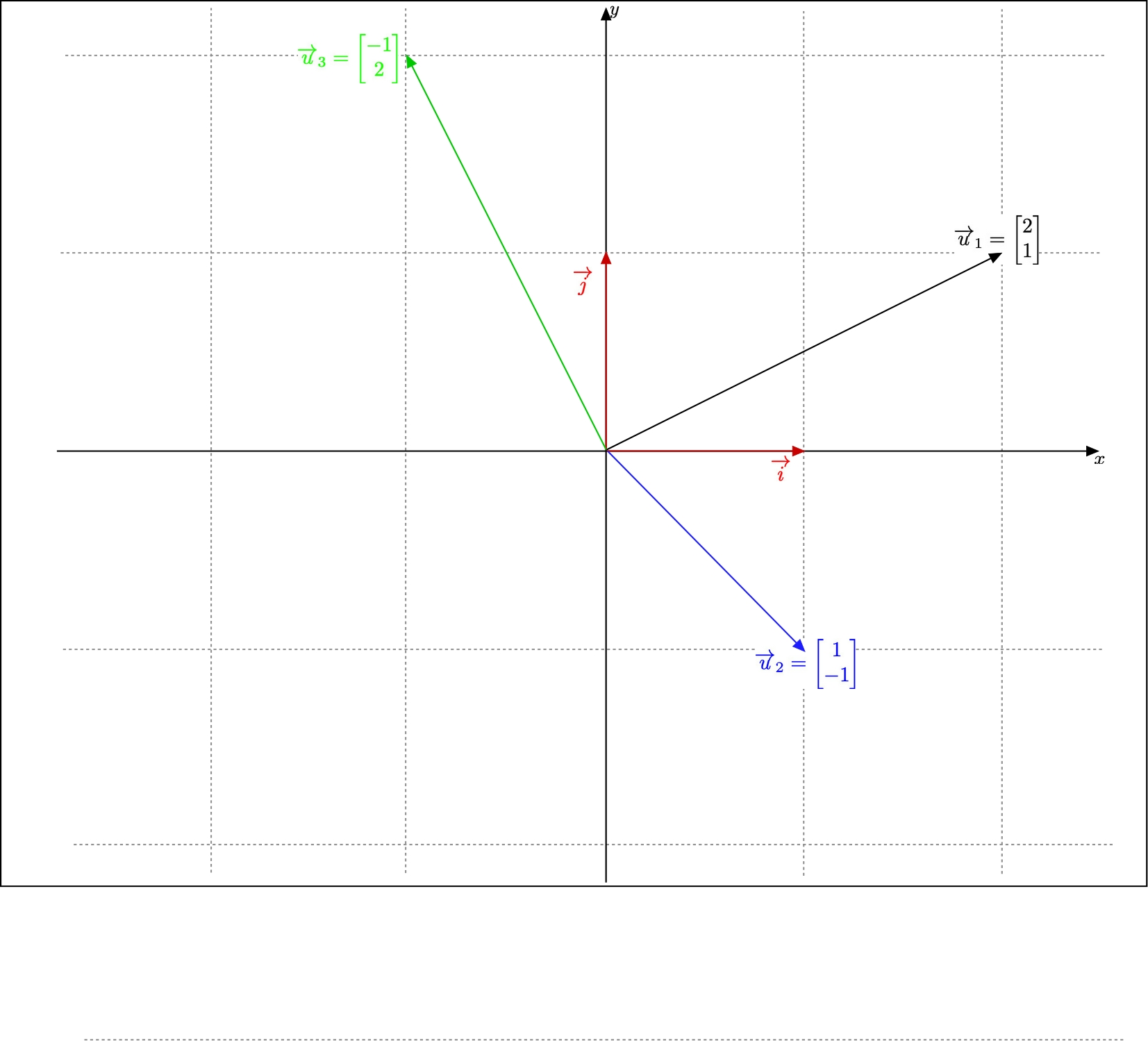
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2,\overrightarrow{u}_3)\in(\mathbb{P}^*)^3\) are non zero vectors such that, say, \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) are not aligned.
Consider the cartesian coordinates of \( \overrightarrow{u}_1\) , \( \overrightarrow{u}_2\) and \( \overrightarrow{u}_3\) , \( \overrightarrow{u}_1=\begin{bmatrix} x_{1}\\y_{1} \end{bmatrix}\) , \( \overrightarrow{u}_2=\begin{bmatrix} x_{2}\\y_{2} \end{bmatrix}\) and \( \overrightarrow{u}_3=\begin{bmatrix} x_{3}\\y_{3} \end{bmatrix}\) .
Then the sytem of linear equations in \( (a_{2},a_{3})\) :
has exactly one solution \( (a_{2},a_{3})\) .
This is because \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\) is a linearly independant ordered set, so that the system of linear equations in \( (a_{2},a_{3})\) :
has exactly one solution \( (0,0)\), and thus its determinant \( x_2y_3-x_3y_2\) is non zero.
Consequently, the linear combination of the vectors in \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,\overrightarrow{u}_3)\) with a non zero coefficient \( 1\) is equal to
\( 1\times\overrightarrow{u}_1+(-a_{2})\overrightarrow{u}_2+(-a_{3})\overrightarrow{u}_3 =\overrightarrow{0}\) .
Hence \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,\overrightarrow{u}_3)\) is linearly dependent.
Theorem 1
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\in\mathbb{P}^n\) are vectors, and consider the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\) .
Then the following assertions hold.
\( S\) is linearly independent if and only if it is either made of a unique non zero vector, or of two non zero vectors that are not aligned.
And \( S\) is linearly dependent if and only if it is either the singleton with the null vector, or at least one of the vectors in \( S\) is a linear combination of the other vectors in \( S\) .
Proof
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\in\mathbb{P}^n\) are vectors, and consider the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\) .
Let’s consider the following cases for \( S\) .
\( S\) is made of a unique vector \( \overrightarrow{u}_1\) and
\( \overrightarrow{u}_1=\overrightarrow{0}\) ,
or \( \overrightarrow{u}_1\ne\overrightarrow{0}\) .
\( S\) is made of two vectors \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\) and
at least one of these vectors is the null vector,
or they are both non zero and,
they are aligned,
or they are non aligned.
\( S\) contains at lest 3 vectors \( (\overrightarrow{u}_1\) , \( (\overrightarrow{u}_2\) and \( (\overrightarrow{u}_3\) .
We have to prove that:
in the cases or a non zero unique vector and of non aligned two vectors, \( S\) is linearly independent and that no vector in \( S\) is a linear combination of the other vectors in \( S\) ,
and in all the other cases, \( S\) is linearly dependent and it is either the singleton with the null vector, or at lest one of the vectors in \( S\) is a linear combination of the other vectors in \( S\) .
Assume that \( S\) is made of a unique vector \( \overrightarrow{u}_1\) .
Assume that \( \overrightarrow{u}_1=\overrightarrow{0}\) ,
Then the linear combination of the vectors in \( S=(\overrightarrow{0})\) with a non zero coefficient \( 1\) is equal to \( 1\times\overrightarrow{0}=\overrightarrow{0}\) .
Hence \( S=(\overrightarrow{0})\) is linearly dependent and it is the singleton with the null vector.
Assume that or \( \overrightarrow{u}_1\ne\overrightarrow{0}\) .
Then, if \( a_{1}\overrightarrow{u}_1=\overrightarrow{0}\) , then \( a_{1}=0\) .
Hence \( S=(\overrightarrow{u}_{1})\) is linearly independent and it is a singleton with a non zero vector.
Assume that \( S\) is made of two vectors \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\) and
Assume that at least one of these vectors is the null vector,
With no loss of generallity, we may assume that \( \overrightarrow{u}_1\ne\overrightarrow{0}\) .
Then the linear combination of the vectors in \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) with a non zero coefficient \( 1\) is equal to \( 1\times\overrightarrow{u}_{1}+0\times\overrightarrow{u}_{2}=\overrightarrow{0}\) .
Hence \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is linearly dependent.
Moreover, \( \overrightarrow{u}_{1}=0\times\overrightarrow{u}_{2}\) , so that \( \overrightarrow{u}_{1}\) is a linear combination of \( \overrightarrow{u}_{2}\) .
Assume that they are both non zero.
Assume that \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) are aligned,
Consider the real number \( k\) such that \( \overrightarrow{u}_2=k\overrightarrow{u}_1\) .
Then the linear combination of the vectors in \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) with a non zero coefficient \( -1\) is equal to \( k\overrightarrow{u}_{1}+(-1)\times\overrightarrow{u}_{2}=\overrightarrow{0}\) .
Hence \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is linearly dependent.
Moreover, \( \overrightarrow{u}_2=k\overrightarrow{u}_1\) , so that \( \overrightarrow{u}_{2}\) is a linear combination of \( \overrightarrow{u}_{1}\) .
Assume that \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) are non aligned.
Then \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is linearly independent because, if there would exist real numbers \( a_{1}\) and \( a_{2}\) with, say, \( a_1\ne 0\) , such that \( a_{1}\overrightarrow{u}_1+a_{2}\overrightarrow{u}_2=\overrightarrow{0}\) , then we would have \( \overrightarrow{u}_2=\frac{a_{1}}{a_{2}}\overrightarrow{u}_1\) , and \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) would be aligned.
Moreover, \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is made of two vectors that are nont aligned.
Assume that \( S\) contains at least 3 vectors \( \overrightarrow{u}_1\) , \( \overrightarrow{u}_2\) and \( \overrightarrow{u}_3\) .
Consider the cartesian coordinates of \( \overrightarrow{u}_1\) , \( \overrightarrow{u}_2\) and \( \overrightarrow{u}_3\) , \( \overrightarrow{u}_1=\begin{bmatrix} x_{1}\\y_{1} \end{bmatrix}\) , \( \overrightarrow{u}_2=\begin{bmatrix} x_{2}\\y_{2} \end{bmatrix}\) and \( \overrightarrow{u}_3=\begin{bmatrix} x_{3}\\y_{3} \end{bmatrix}\) .
Then the sytem of linear equations in \( (a_{2},a_{3})\) :
has at least one solution \( (a_{2},a_{3})\) .
Consequently, the linear combination of the vectors in \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\) with a non zero coefficient \( 1\) is equal to
\( 1\times\overrightarrow{u}_1+(-a_{2})\overrightarrow{u}_2+(-a_{3})\overrightarrow{u}_3 +0\times\overrightarrow{u}_4+…+0\times\overrightarrow{u}_n=\overrightarrow{0}\) .
Hence \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\) is linearly dependent.
Moreover, \( \overrightarrow{u}_1=a_{2}\overrightarrow{u}_2+a_{3}\overrightarrow{u}_3 +0\times\overrightarrow{u}_4+…+0\times\overrightarrow{u}_n\) ,so that \( \overrightarrow{u}_{1}\) is a linear combination of \( \overrightarrow{u}_2,…,\overrightarrow{u}_n\)
Definition 2
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\in\mathbb{P}^n\) are vectors, and consider the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\) .
Then the following definitions are given.
\( S\) is a spanning ordered set if and only if any vector in the plane is a linear combination of the vectors in \( S\) :
\( \forall\;\overrightarrow{v}\in\mathbb{P},\; \exists (a_1,a_2…,a_n)\in\mathbb{R}^n\;|\; \overrightarrow{v}=a_1\overrightarrow{u}_1+a_2\overrightarrow{u}_2+…+a_n\overrightarrow{u}_n\)
And \( S\) is a non spanning ordered set otherwise.
Assume that \( \overrightarrow{u}\in\mathbb{P}^{*}\) is a non zero vector.
Then, as none of the non zero vectors that are not aligned with \( \overrightarrow{u}\) is a scalar multiple of \( \overrightarrow{u}\) , the ordered set \( S=(\overrightarrow{u})\) is a non spanning ordered set.
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\in(\mathbb{P}^*)^2\) are non aligned non zero vectors.
Assume that \( \overrightarrow{v}\in\mathbb{P}\) is any vector in the plane.
Consider the cartesian coordinates of \( \overrightarrow{u}_1\) , \( \overrightarrow{u}_2\) and \( \overrightarrow{v}\) , \( \overrightarrow{u}_1=\begin{bmatrix} x_{1}\\y_{1} \end{bmatrix}\) , \( \overrightarrow{u}_2=\begin{bmatrix} x_{2}\\y_{2} \end{bmatrix}\) and \( \overrightarrow{v}=\begin{bmatrix} z\\t \end{bmatrix}\) .
Then the sytem of linear equations in \( (a_{1},a_{2})\) :
has at exactly one solution \( (a_{1},a_{2})\) .
This is because \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\) is a linearly independant ordered set, so that the system of linear equations in \( (a_{2},a_{3})\) :
has exactly one solution \( (0,0)\), and thus its determinant \( x_2y_3-x_3y_2\) is non zero.
Consequently, \( \overrightarrow{v}=a_1\overrightarrow{u}_1+a_2\overrightarrow{u}_2\) , so that \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is a spanning ordered set.
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\in(\mathbb{P}^*)^2\) are aligned non zero vectors.
Then, as any linear combination of \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) is aligned with \( \overrightarrow{u}_1\) , no vector that is not aligned with \( \overrightarrow{u}_1\) may be written as a linear combination of \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) .
Consequently, \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is a non spanning ordered set.
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2,\overrightarrow{u}_3)\in(\mathbb{P}^*)^3\) are non zero vectors such that, say, \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) are not aligned.
Then, as \( S'=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is a spanning ordered set, any vector in the plane is a linear combination of \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) , and consequently of \( \overrightarrow{u}_1\) , \( \overrightarrow{u}_2\) and \( \overrightarrow{u}_3\) , with a zero coefficient for \( \overrightarrow{u}_3\) .
Consequently, \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\) is a spanning ordered set.
Theorem 2
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\in\mathbb{P}^n\) are vectors, and consider the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\) .
Then the following assertions hold.
\( S\) is a spanning ordered set if and only if it contains at least two non aligned non zero vectors.
If an ordered set contains some vectors forming a spanning ordered set, then it is spanning as well.
Proof
Assume that \( (\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\in\mathbb{P}^n\) are vectors, and consider the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2,…,\overrightarrow{u}_n)\) .
\( S\) is in one of the following cases.
All the vectors in \( S\) are equal to the null vector.
Then, as any linear combination of the vectors in \( S\) is equal to the null vector, no non zero vector may be written as a linear combination of the vectors in \( S\) .
All the non zero vectors in \( S\) are aligned.
Then, as any linear combination of the vectors in \( S\) is aligned with these vectors or is the null vector, no vector that is not aligned with the non zero vectors in \( S\) may be written as a linear combination of the vectors in \( S\) .
\( S\) contains at least two non aligned non zero vectors, say \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) .
Then, as \( S'=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is a spanning ordered set, any vector in the plane is a linear combination of \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) , and consequently of the vectors in \( S\) , with zero coefficients for the possible other vectors in \( S\) .
If an ordered set contains some vectors forming a spanning ordered set, then it is spanning as well.
Indeed, it is sufficient to fill the linear combination of the spanning subset with zero coefficients for the other vectors in \( S\) .
Definition 3
A basis of the vector plane \( \mathbb{P}\) is a spanning ordered set that is linearly independent.
Let’s denote that he canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) is indeed a basis of the plane, because it is a spanning ordered set that is linearly independent.
The theorems 1 and 2 give us which kind of ordered sets are bases in \( \mathbb{P}\) .
Theorem 3
A basis of the plane \( \mathbb{P}\) is an ordered set composed of 2 non aligned non zero vectors.
As any basis of the plane is made of 2 vectors, we say that the vector plane \( \mathbb{P}\) is of dimension 2.
Theorem 4
If \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis of the plane, then for any vector \( \overrightarrow{v}\in\mathbb{P}\) , there exists a unique couple of scalars \( (x,y)\in\mathbb{R}^2\) such that \( \overrightarrow{v}=x\overrightarrow{I}+y\overrightarrow{J}\) .
These scalars \( (x,y)\) are called the coordinates of \( \overrightarrow{v}\) in the basis \( B\) , and the column vector of these coordinates is denoted \( [\overrightarrow{v}]_B=\begin{bmatrix}x\\y\end{bmatrix}\) .
Note that, if \( \overrightarrow{v}\) is the column vector \( \overrightarrow{v}=\begin{bmatrix}x_0\\y_0\end{bmatrix}\) , then \( [\overrightarrow{v}]_{B_0}=\begin{bmatrix}x_0\\y_0\end{bmatrix}\) . This is because \( \overrightarrow{v}=x_0\overrightarrow{i}+y_0\overrightarrow{j}\) .
Proof (of the theorem 4)
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis of the plane, and that \( \overrightarrow{v}\in\mathbb{P}\) is a vector.
Then, as \( B=(\overrightarrow{I},\overrightarrow{J})\) is a spanning ordered set, we may consider scalars \( (x,y)\in\mathbb{R}^2\) such that \( \overrightarrow{v}=x\overrightarrow{I}+y\overrightarrow{J}\) .
But these scalars are unique.
Indeed, assume that \( (x',y')\in\mathbb{R}^2\) are scalars such that \( \overrightarrow{v}=x'\overrightarrow{I}+y'\overrightarrow{J}\) as well.
Then \( (x-x')\overrightarrow{I}+(y-y')\overrightarrow{J}=\overrightarrow{0}\) .
So that, as \( B=(\overrightarrow{I},\overrightarrow{J})\) is a linearly independent ordered set,
\( x-x'=y-y'=0\) .
Consequently, \( x'=x\) and \( y'=y\) .

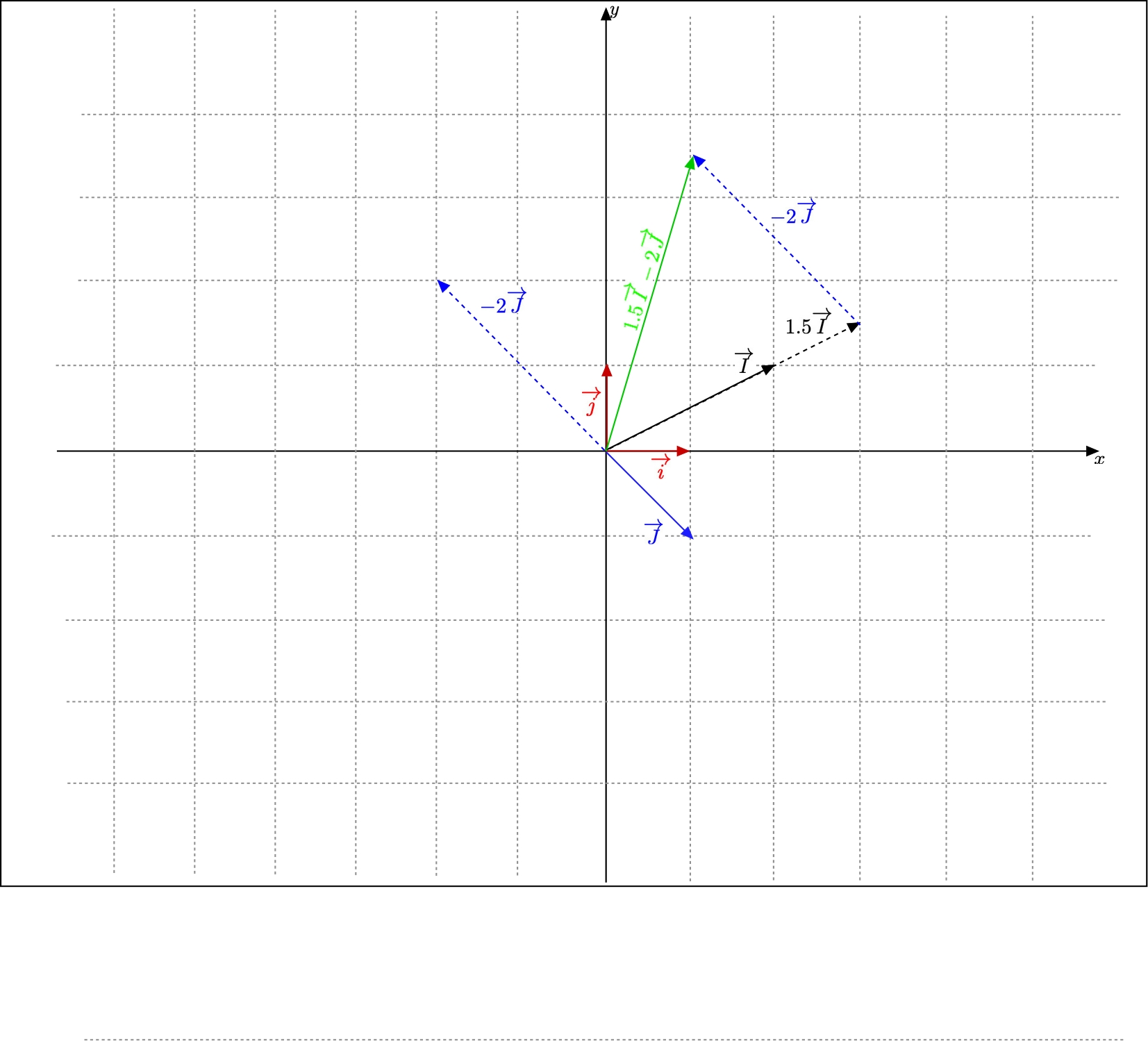
Assume that \( (\overrightarrow{I},\overrightarrow{J})\in(\mathbb{P}^*)^2\) are non aligned non zero vectors.
Assume that \( (a,b)\in(\mathbb{R}^*_+)^2\) are scalars such that \( a>0\) and \( b>0\) .
Then the following assertions hold.
The vector \( a\overrightarrow{I}\) is positively aligned with \( \overrightarrow{I}\) and its norm is \( \left\|a\overrightarrow{I}\right\|=a\left\|\overrightarrow{I}\right\|\) .
The vector \( b\overrightarrow{J}\) is positively aligned with \( \overrightarrow{J}\) and its norm is \( \left\|b\overrightarrow{J}\right\|=b\left\|\overrightarrow{J}\right\|\) .
Because of the geometrical view of the sum of two non zero vectors studied in lecture 15 of section 4, the vector \( a\overrightarrow{I}+b\overrightarrow{J}\) is built by drawing the vector \( b\overrightarrow{J}\) at the end of the vector \( a\overrightarrow{I}\) .
\( (\overrightarrow{I},\overrightarrow{J})\in(\mathbb{P}^*)^2\) are non aligned non zero vectors.
Assume that \( (a,b)\in\mathbb{R}^*_+\times\mathbb{R}^*_-\) are scalars such that \( a>0\) and \( b<0\) .
Then the following assertions hold.
The vector \( a\overrightarrow{I}\) is positively aligned with \( \overrightarrow{I}\) and its norm is \( \left\|a\overrightarrow{I}\right\|=a\left\|\overrightarrow{I}\right\|\) .
The vector \( b\overrightarrow{J}\) is negatively aligned with \( \overrightarrow{J}\) and its norm is \( \left\|b\overrightarrow{J}\right\|=|b|\left\|\overrightarrow{J}\right\|\) .
The vector \( a\overrightarrow{I}+b\overrightarrow{J}\) is built by drawing the vector \( b\overrightarrow{J}\) at the end of the vector \( a\overrightarrow{I}\) .
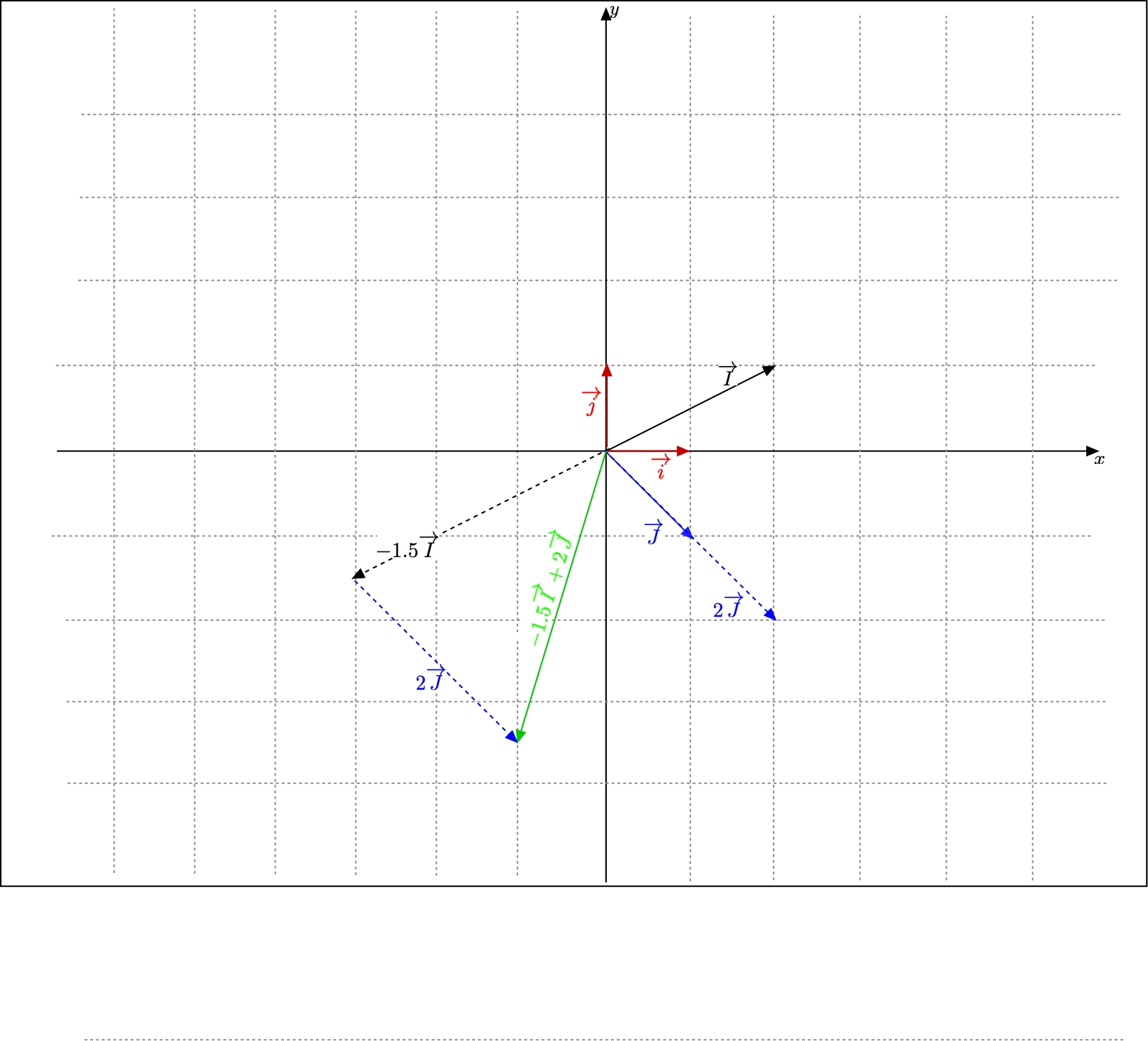
Assume that \( (\overrightarrow{I},\overrightarrow{J})\in(\mathbb{P}^*)^2\) are non aligned non zero vectors.
Assume that \( (a,b)\in\mathbb{R}^*_-\times\mathbb{R}^*_+\) are scalars such that \( a<0\) and \( b>0\) .
Then the following assertions hold.
The vector \( a\overrightarrow{I}\) is negatively aligned with \( \overrightarrow{I}\) and its norm is \( \left\|a\overrightarrow{I}\right\|=|a|\left\|\overrightarrow{I}\right\|\) .
The vector \( b\overrightarrow{J}\) is positively aligned with \( \overrightarrow{J}\) and its norm is \( \left\|b\overrightarrow{J}\right\|=b\left\|\overrightarrow{J}\right\|\) .
The vector \( a\overrightarrow{I}+b\overrightarrow{J}\) is built by drawing the vector \( b\overrightarrow{J}\) at the end of the vector \( a\overrightarrow{I}\) .
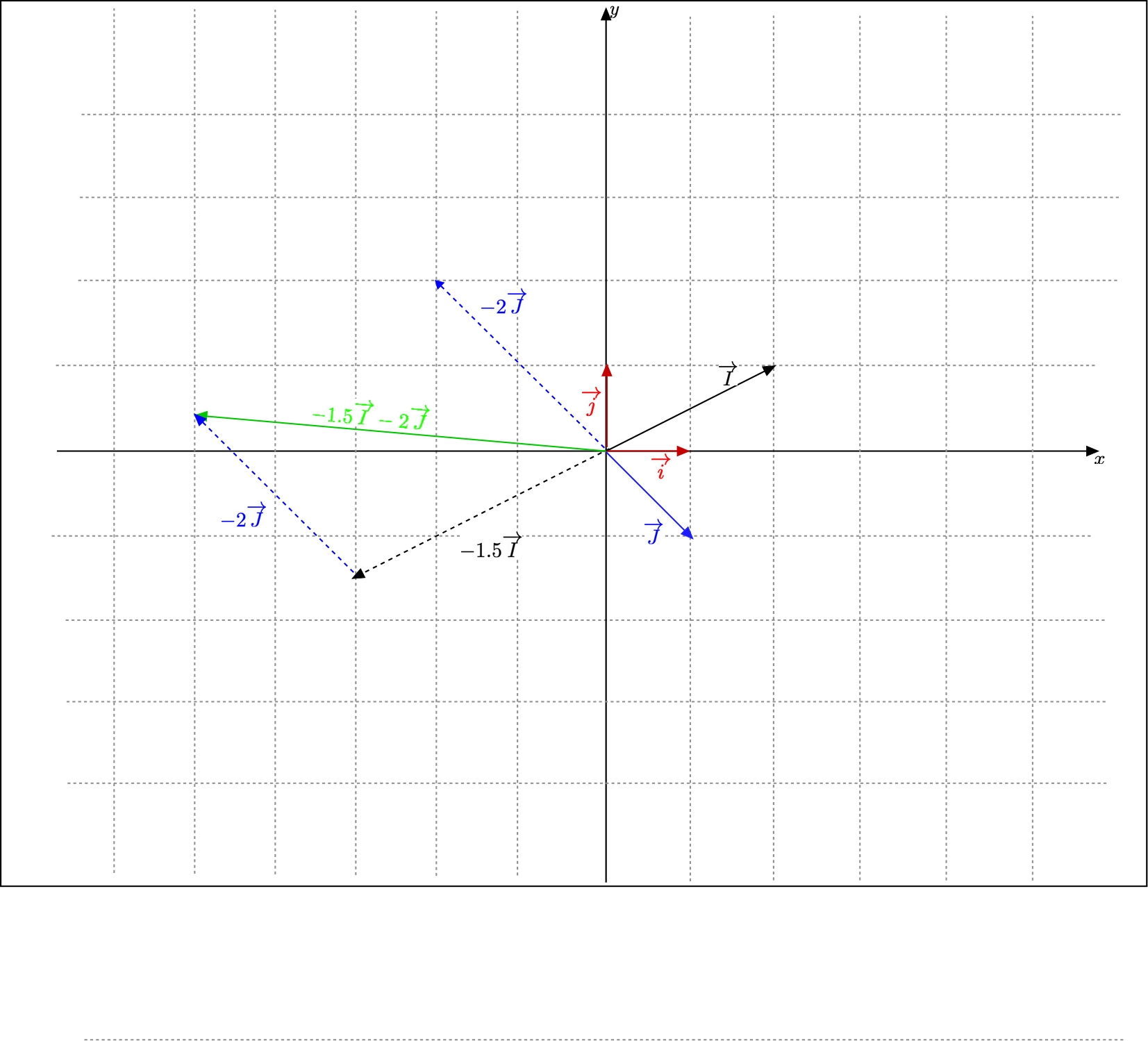
Assume that \( (\overrightarrow{I},\overrightarrow{J})\in(\mathbb{P}^*)^2\) are non aligned non zero vectors.
Assume that \( (a,b)\in(\mathbb{R}^*_-)^2\) are scalars such that \( a<0\) and \( b<0\) .
Then the following assertions hold.
The vector \( a\overrightarrow{I}\) is negatively aligned with \( \overrightarrow{I}\) and its norm is \( \left\|a\overrightarrow{I}\right\|=|a|\left\|\overrightarrow{I}\right\|\) .
The vector \( b\overrightarrow{J}\) is negatively aligned with \( \overrightarrow{J}\) and its norm is \( \left\|b\overrightarrow{J}\right\|=|b|\left\|\overrightarrow{J}\right\|\) .
Because of the geometrical view of the sum of two non zero vectors studied in lecture 15 of section 4, the vector \( a\overrightarrow{I}+b\overrightarrow{J}\) is built by drawing the vector \( b\overrightarrow{J}\) at the end of the vector \( a\overrightarrow{I}\) .
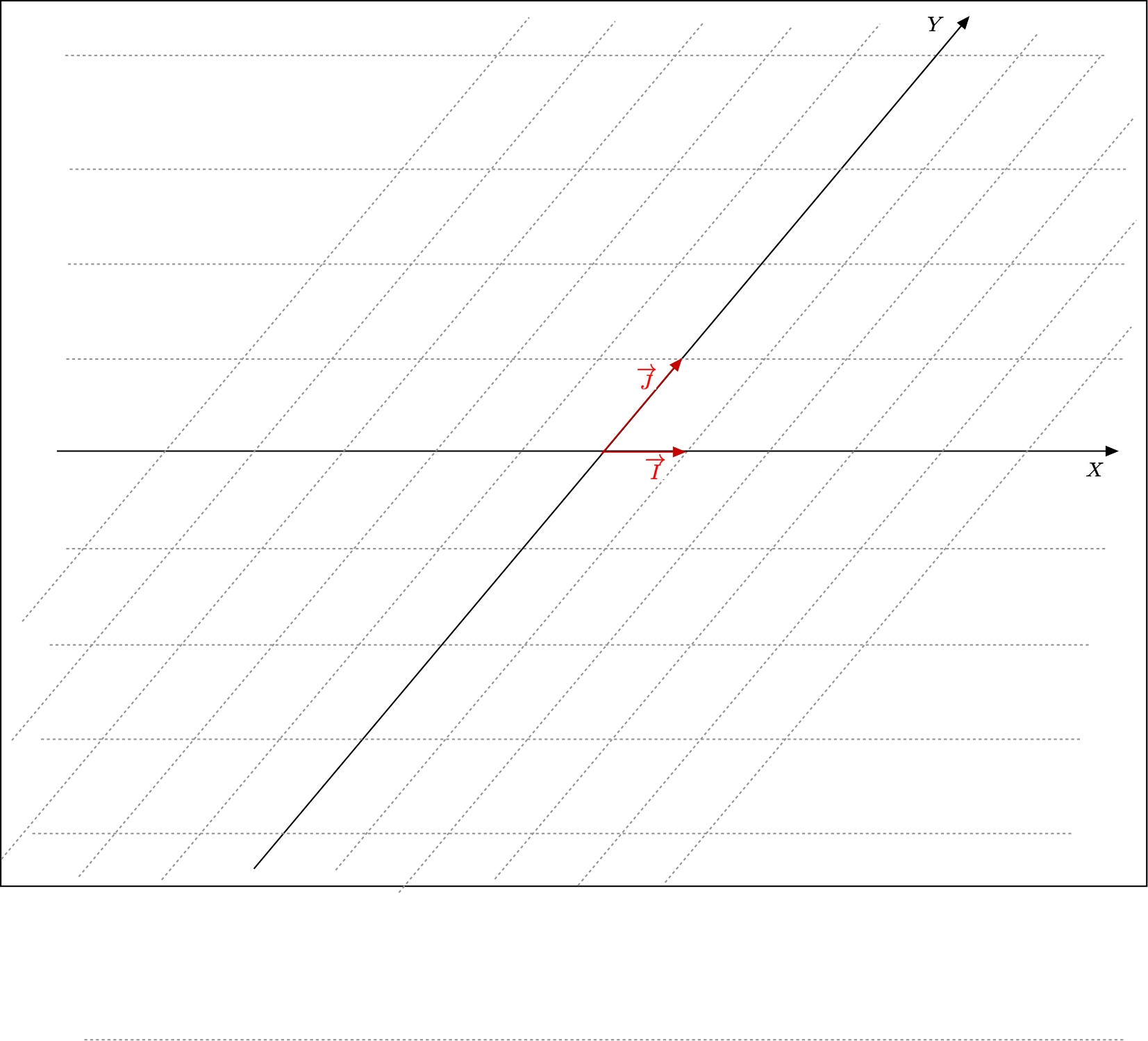
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis in the plane.
Then the following geometrical facts occur.
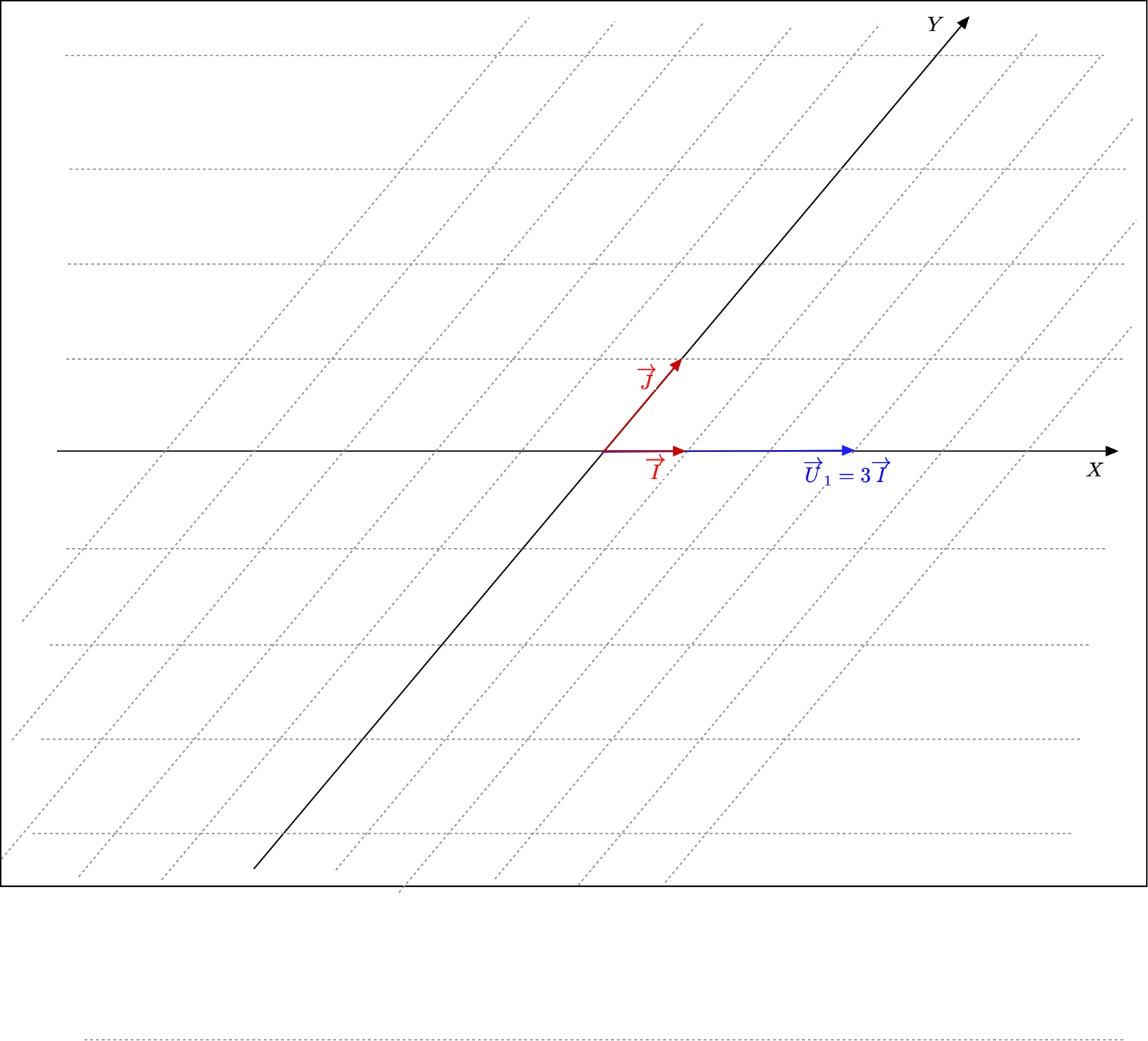
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis in the plane.
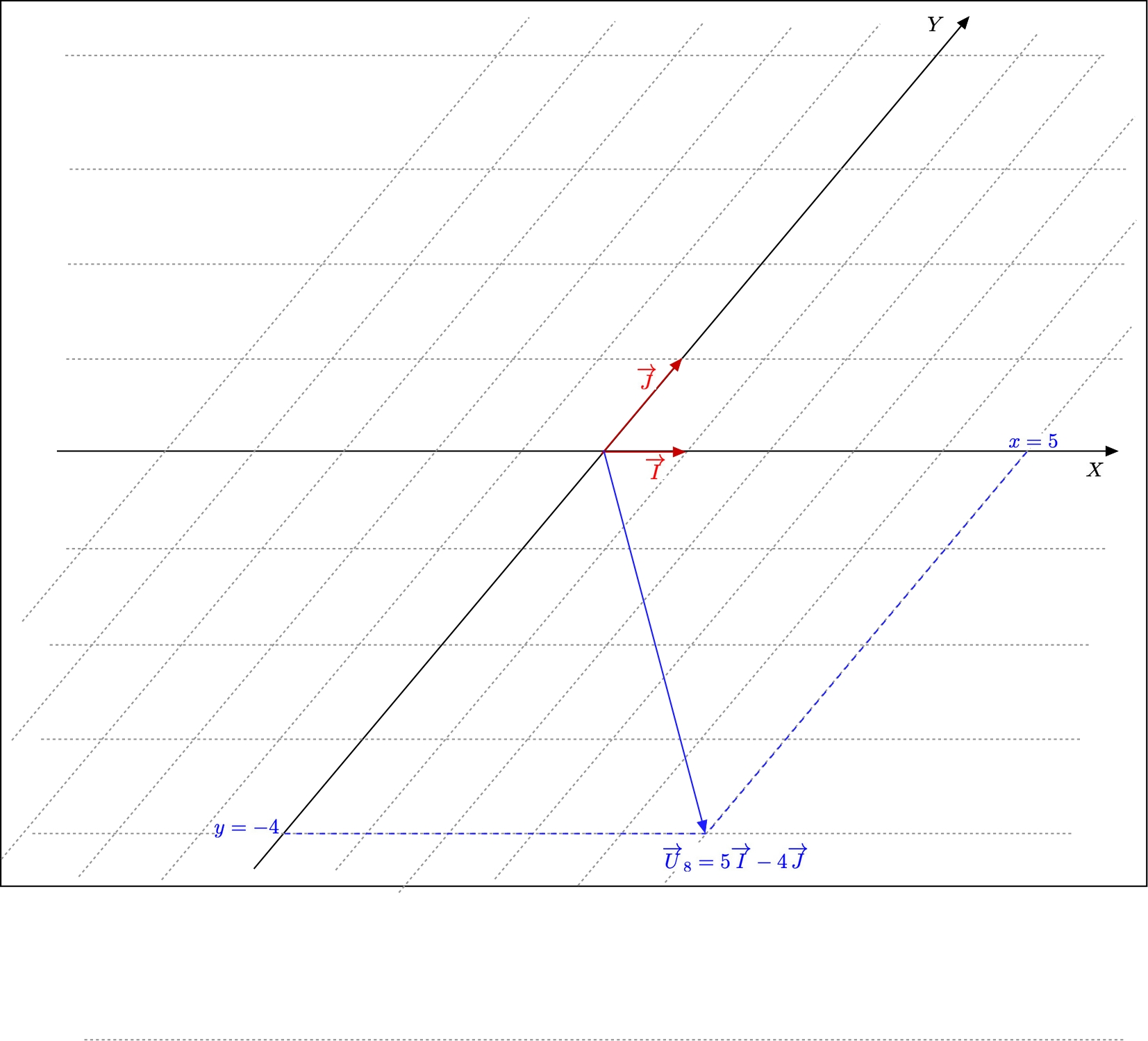
Assume that \( x\in\mathbb{R_+^*}\) is a real number such that \( x>0\) , and consider the vector \( \overrightarrow{v}\in\mathbb{P}\) such that \( [\overrightarrow{v}]_B=\begin{bmatrix}x\\0\end{bmatrix}\) .
Then the following geometrical facts occur.
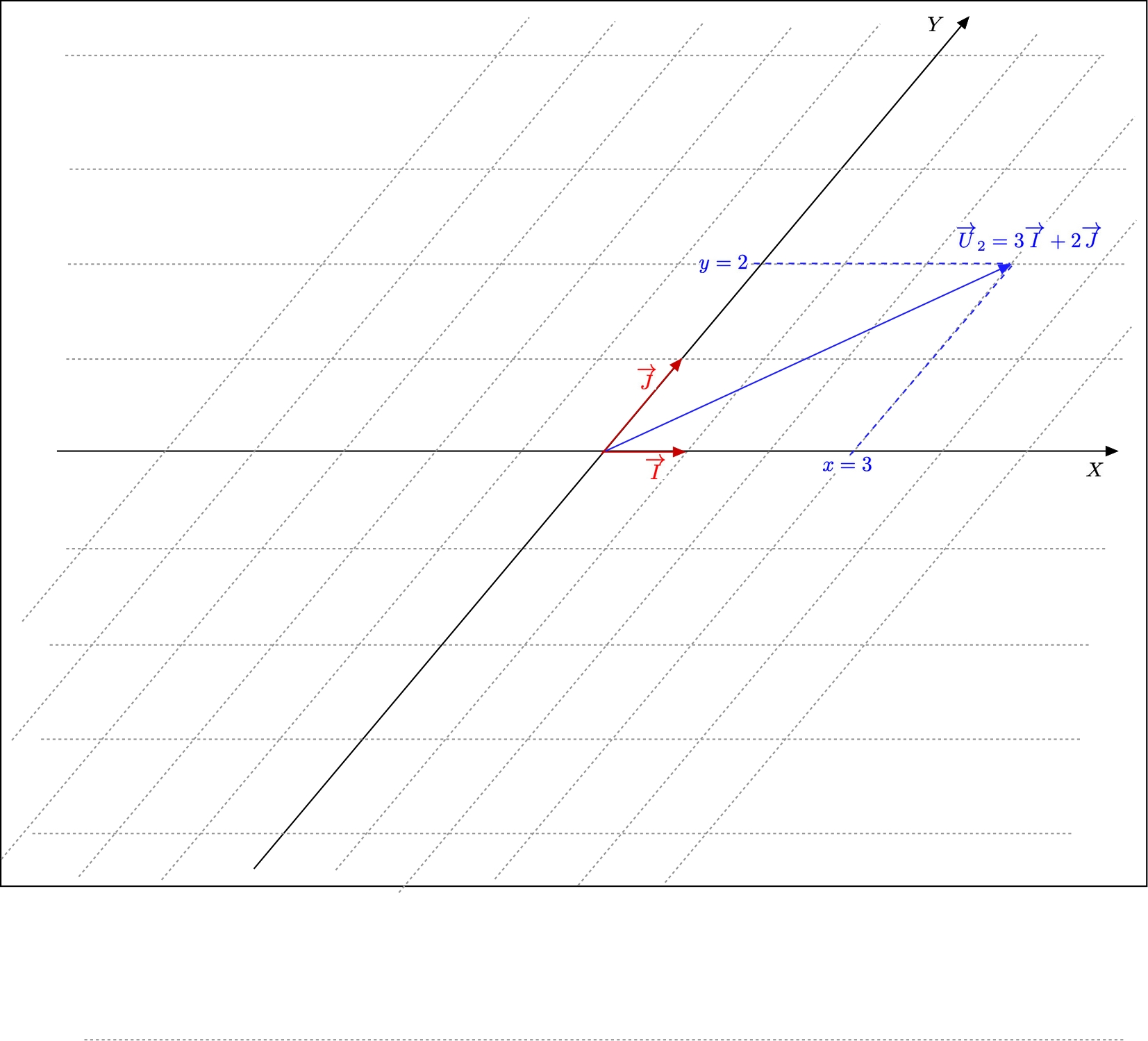
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis in the plane.
Assume that \( (x,y)\in(\mathbb{R_+^*)^{2}}\) are real numbers such that \( x>0\) and \( y>0\) , and consider the vector \( \overrightarrow{v}\in\mathbb{P}\) such that \( [\overrightarrow{v}]_B=\begin{bmatrix}x\\y\end{bmatrix}\) .
Then the following geometrical facts occur.

Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis in the plane.
Assume that \( y\in\mathbb{R_+^*}\) is a real number such that \( y>0\) , and consider the vector \( \overrightarrow{v}\in\mathbb{P}\) such that \( [\overrightarrow{v}]_B=\begin{bmatrix}0\\y\end{bmatrix}\) .
Then the following geometrical facts occur.
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis in the plane.
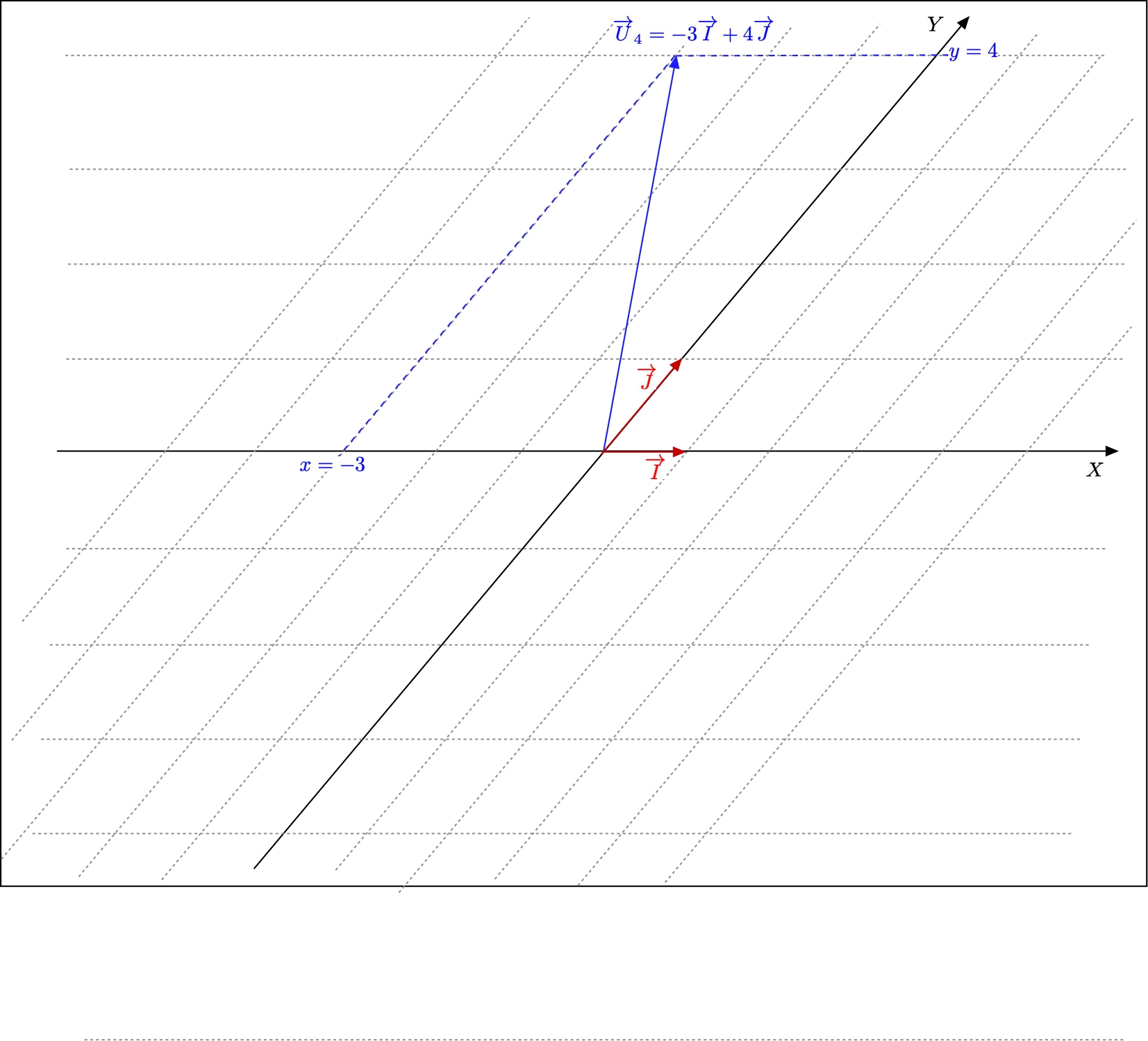
Assume that \( (x,y)\in\mathbb{R_-^*}\times\mathbb{R_+^*}\) are real numbers such that \( x<0\) and \( y>0\) , and consider the vector \( \overrightarrow{v}\in\mathbb{P}\) such that \( [\overrightarrow{v}]_B=\begin{bmatrix}x\\y\end{bmatrix}\) .
Then the following geometrical facts occur.
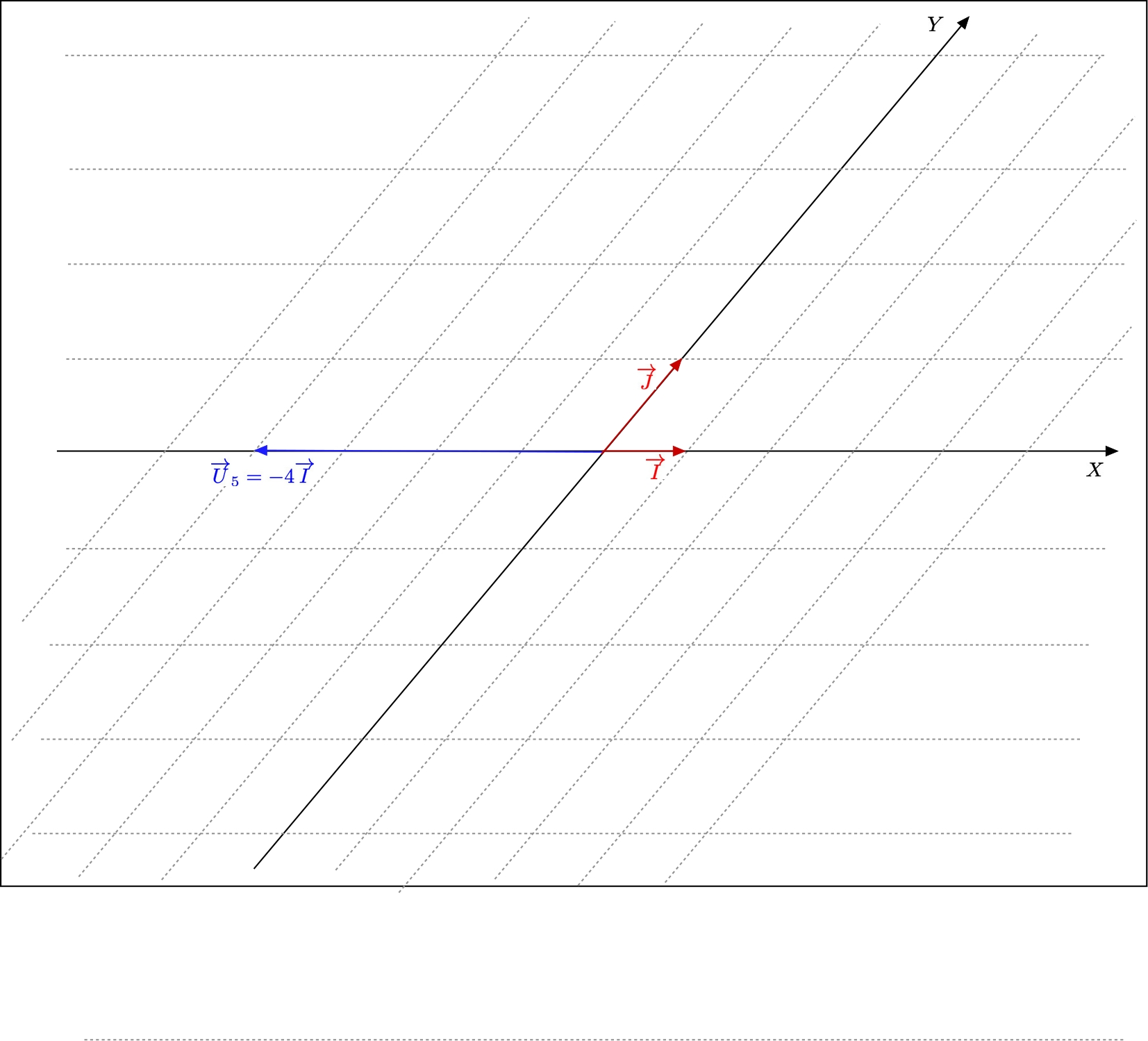
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis in the plane.
Assume that \( x\in\mathbb{R_-^*}\) is a real number such that \( x<0\) , and consider the vector \( \overrightarrow{v}\in\mathbb{P}\) such that \( [\overrightarrow{v}]_B=\begin{bmatrix}x\\0\end{bmatrix}\) .
Then the following geometrical facts occur.
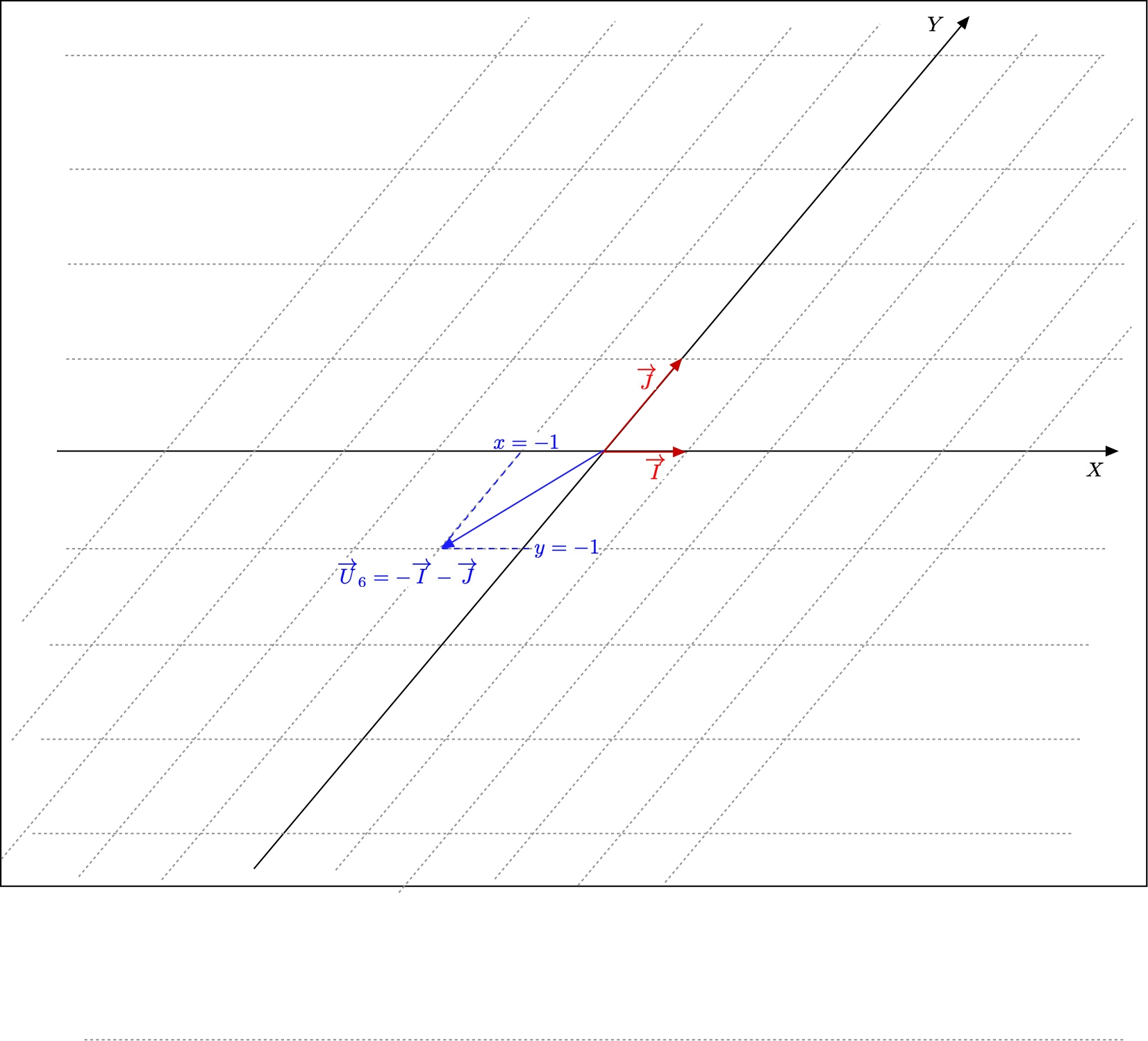
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis in the plane.
Assume that \( (x,y)\in(\mathbb{R_-^*)^{2}}\) are real numbers such that \( x<0\) and \( y<0\) , and consider the vector \( \overrightarrow{v}\in\mathbb{P}\) such that \( [\overrightarrow{v}]_B=\begin{bmatrix}x\\y\end{bmatrix}\) .
Then the following geometrical facts occur.
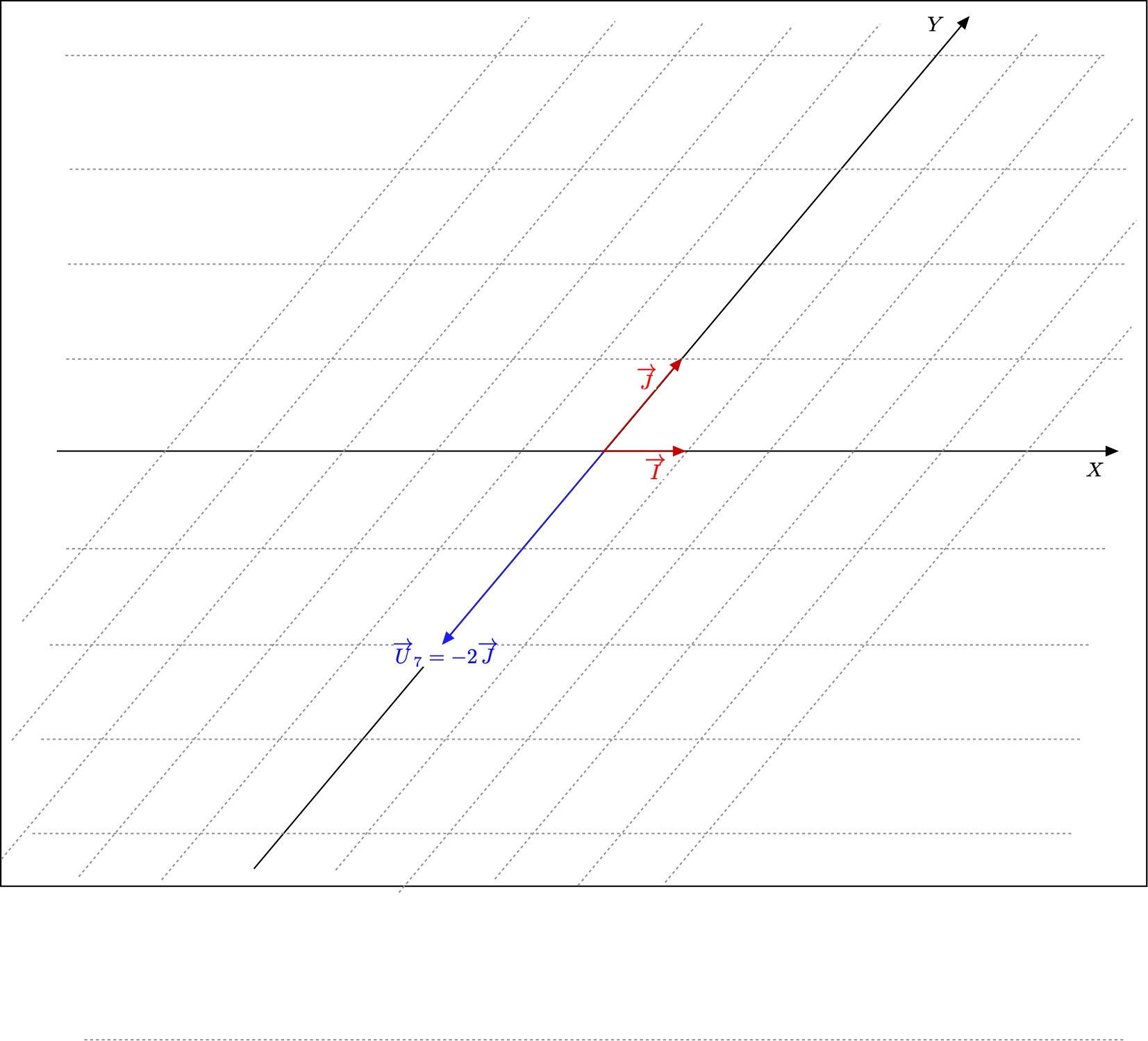
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis in the plane.
Assume that \( y\in\mathbb{R_-^*}\) is a real number such that \( y<0\) , and consider the vector \( \overrightarrow{v}\in\mathbb{P}\) such that \( [\overrightarrow{v}]_B=\begin{bmatrix}0\\y\end{bmatrix}\) .
Then the following geometrical facts occur.
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis in the plane.
Assume that \( (x,y)\in\mathbb{R_+^*}\times\mathbb{R_-^*}\) are real numbers such that \( x>0\) and \( y<0\) , and consider the vector \( \overrightarrow{v}\in\mathbb{P}\) such that \( [\overrightarrow{v}]_B=\begin{bmatrix}x\\y\end{bmatrix}\) .
Then the following geometrical facts occur.
With the help of the inverse of so called transition matrix, we will be able to calculate the coordinates in a new basis when the coordinates in an old basis are known.
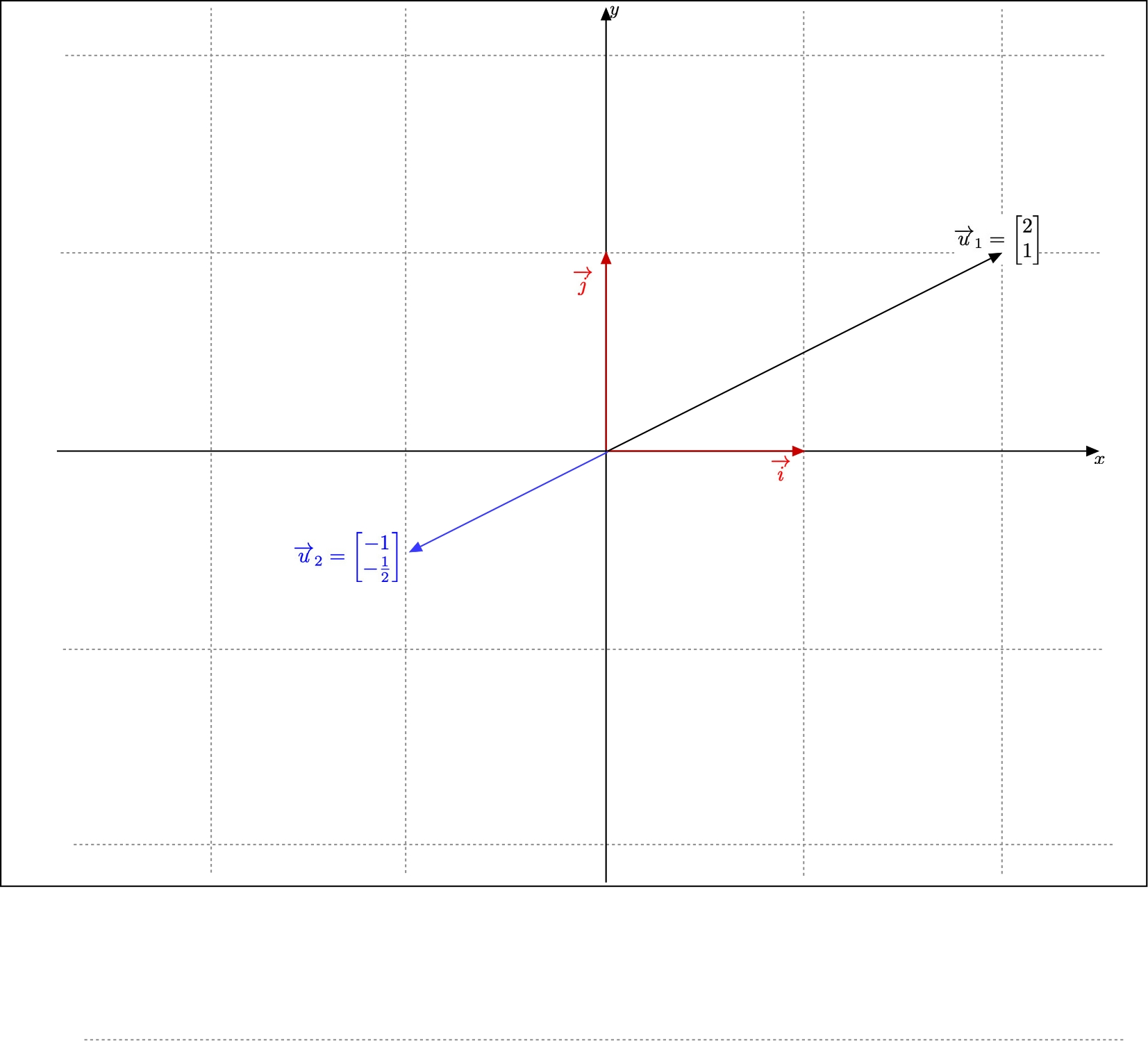
Consider the aligned non zero vectors in the plane:
\( \overrightarrow{u}_1\) with column vector of coordinates in the canonical basis \( X_1=\begin{bmatrix}2\\1\end{bmatrix}\) ,
and \( \overrightarrow{u}_2=-\frac{1}{2}\overrightarrow{u}_1\) with column vector of coordinates in the canonical basis \( X_2=\begin{bmatrix}-1\\{-\frac{1}{2}}\end{bmatrix}\) .
Consider the matrix \( P\) with columns the column vectors \( X_{1}\) and \( X_{2}\) :
\( P=\begin{bmatrix}2&-1\\1&-\frac{1}{2}\end{bmatrix}\)
Then the following assertions hold:
The determinant of \( P\) is \( \det(P)=2\times\left(-\frac{1}{2}\right)-1\times(-1)=-1+1=0\) .
Consequently, \( P\) is not invertible.
And, as \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) are aligned, the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is not a basis of the plane.
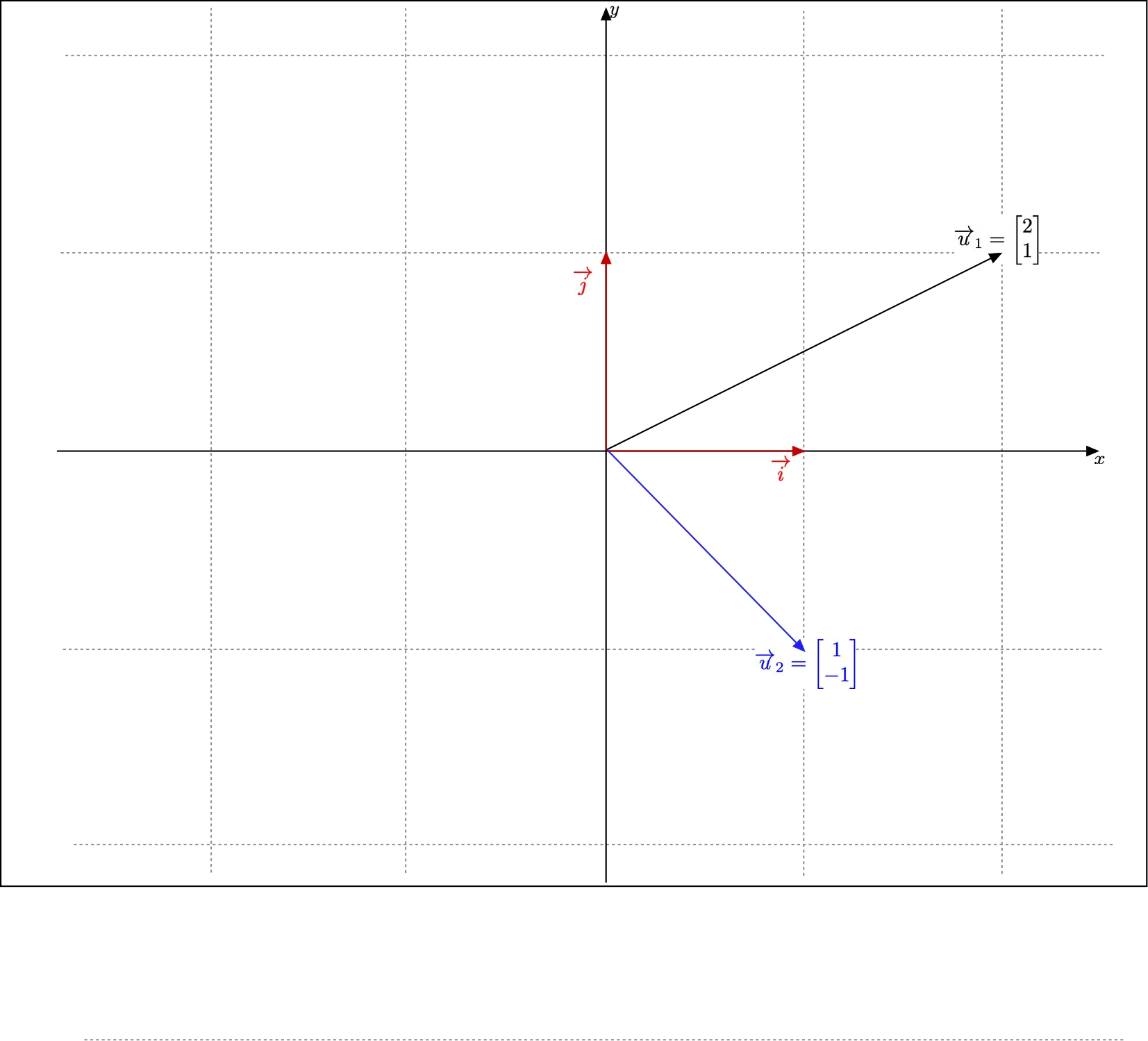
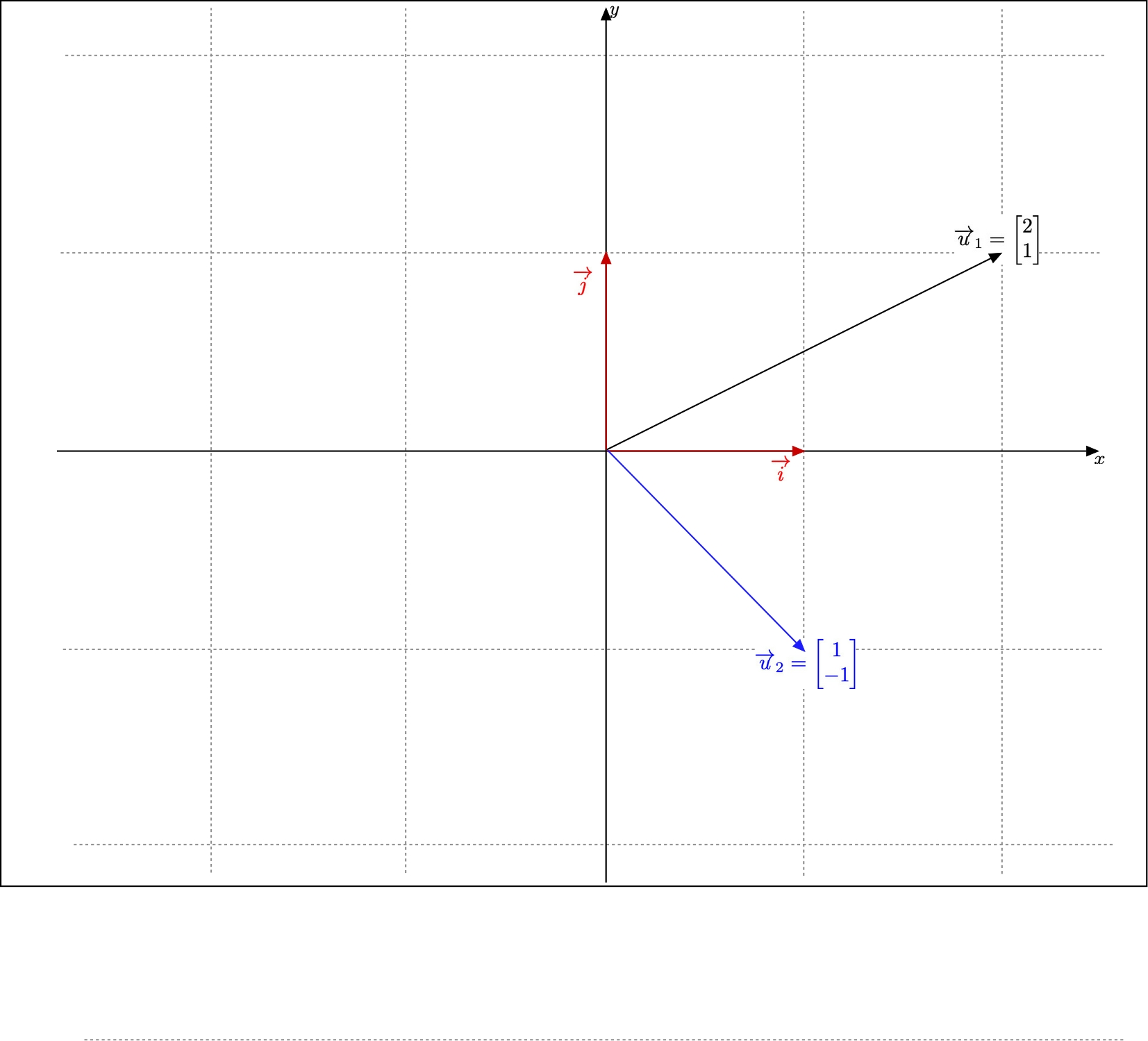
Consider the non aligned non zero vectors in the plane:
\( \overrightarrow{u}_1\) with column vector of coordinates in the canonical basis \( X_1=\begin{bmatrix}2\\1\end{bmatrix}\) ,
and \( \overrightarrow{u}_2\) with column vector of coordinates in the canonical basis \( X_2=\begin{bmatrix}1\\{-1}\end{bmatrix}\) .
Consider the matrix \( P\) with columns the column vectors \( X_{1}\) and \( X_{2}\) :
\( P=\begin{bmatrix}2&1\\1&-1\end{bmatrix}\) .
Then the following assertions hold:
The determinant of \( P\) is \( \det(P)=2\times(-1)-1\times 1=-2-1=-3\ne 0\) .
Consequently, \( P\) is invertible.
And, as \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) are non aligned non zero vectors, the ordered set \( S=(\overrightarrow{u}_1,\overrightarrow{u}_2)\) is a basis of the plane.
Theorem 5
Assume that \( (x_I,y_I,x_J,y_J)\in\mathbb{R}^4\) are real numbers and consider the two vectors in the plane:
\( \overrightarrow{I}\) with column vector of coordinates in the canonical basis \( X_I=\begin{bmatrix}x_{I}\\y_{I}\end{bmatrix}\) ,
and \( \overrightarrow{J}\) with column vector of coordinates in the canonical basis \( X_J=\begin{bmatrix}x_{J}\\y_{J}\end{bmatrix}\) .
Consider the matrix \( P\) with columns the column vectors \( X_{I}\) and \( X_{J}\) :
\( P=\begin{bmatrix}x_I&x_J\\y_I&y_J\end{bmatrix}\) .
Then the following assertions are equivalent.
The ordered set \( S=(\overrightarrow{I},\overrightarrow{J})\) is a basis of the plane.
\( \overrightarrow{I}\) and \( \overrightarrow{J}\) are non aligned non zero vectors.
The determinant of \( P\) is non zero.
The matrix \( P\) is invertible.
Proof
Assume that \( (x_I,y_I,x_J,y_J)\in\mathbb{R}^4\) are real numbers and consider the two vectors in the plane:
\( \overrightarrow{I}\) with column vector of coordinates in the canonical basis \( X_I=\begin{bmatrix}x_{I}\\y_{I}\end{bmatrix}\) ,
and \( \overrightarrow{J}\) with column vector of coordinates in the canonical basis \( X_J=\begin{bmatrix}x_{J}\\y_{J}\end{bmatrix}\) .
Consider the matrix \( P\) with columns the column vectors \( X_{I}\) and \( X_{J}\) :
\( P=\begin{bmatrix}x_I&x_J\\y_I&y_J\end{bmatrix}\) .
Then the following equivalences are already known:
(I) and (II) are equivalent.
(III) and (IV) are equivalent.
We have now to prove that (II) and (III) are equivalent.
But this is equivalent to the proof of the equivalence of the negation of the assertions (II) and (III), that are:
\( \overrightarrow{I}\) and \( \overrightarrow{J}\) are aligned non zero vectors, or at least one of them is the zero vector.
\( \det(P)=0\) .
Assume that (V) is verified.
If one at least of the vectors \( \overrightarrow{I}\) and \( \overrightarrow{J}\) , say \( \overrightarrow{I}\) , is the zero vector, then \( P=\begin{bmatrix}0&x_J\\0&y_J\end{bmatrix}\) , so that: \( \det(P)=0\times y_{J} - 0\times x_{J}=0\) .
And if \( \overrightarrow{I}\) and \( \overrightarrow{J}\) are aligned non zero vectors, then we may consider the scalar \( k\) such that \( \overrightarrow{J}=k\overrightarrow{I}\) .
In that case, \( P=\begin{bmatrix}x_I&kx_I\\y_I&ky_I\end{bmatrix}\) , so that \( \det(P)=x_{I}(ky_{I})-y_{I}(kx_{I})=0\) .
Consequently, (VI) is verified.
Assume now that (VI) is verified.
Then \( x_{I}y_{J}=y_{I}x_{J}\) .
If \( x_{I}=0\) , then either \( y_{J}=0\) and thus \( \overrightarrow{I}\) is the zero vector, of \( x_{J}=0\) and thus \( \overrightarrow{I}\) and \( \overrightarrow{J}\) are both aligned with \( \overrightarrow{j}\) or one of them is the zero vector.
And if \( x_{I}\ne 0\) , then either \( x_{J}=y_{J}=0\) and thus \( \overrightarrow{J}\) is the zero vector, or \( \frac{y_{J}}{y_{I}}=\frac{x_{J}}{x_{I}}\ne 0\) , that we denote \( k\) that fraction, then \( \overrightarrow{J}=k\overrightarrow{I}\) , and \( \overrightarrow{I}\) and \( \overrightarrow{J}\) are aligned non zero vectors.
Consequently, (V) is verified.
Theorem 6
Consider the canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) of the plane.
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is another basis of the plane, where:
the column vector of coordinates of \( \overrightarrow{I}\) in the canonical basis is \( X_I=\begin{bmatrix}x_I\\y_I\end{bmatrix}\) ,
and the column vector of coordinates of \( \overrightarrow{J}\) in the canonical basis is \( X_J=\begin{bmatrix}x_J\\y_J\end{bmatrix}\) .
Consider the matrix \( P\) with columns the column vectors \( X_{I}\) and \( X_{J}\) :
\( P=\begin{bmatrix}x_I&x_J\\y_I&y_J\end{bmatrix}\) .
Assume that \( \overrightarrow{u}\in\mathbb{P}\) is a vector such that:
its column vector of coordinates in the canonical basis is \( [\overrightarrow{u}]_{B_0}=X=\begin{bmatrix}x_1\\x_2\end{bmatrix}\) ,
and its column vector of coordinates in the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) is \( [\overrightarrow{u}]_{B}=Y=\begin{bmatrix}y_1\\y_2\end{bmatrix}\)
Then \( P\) is invertible and \( X=PY\) so that \( Y=P^{-1}X\) .
Definition 4
Consider the canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) of the plane.
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is another basis of the plane, where:
the column vector of coordinates of \( \overrightarrow{I}\) in the canonical basis is \( X_I=\begin{bmatrix}x_I\\y_I\end{bmatrix}\) ,
and the column vector of coordinates of \( \overrightarrow{J}\) in the canonical basis is \( X_J=\begin{bmatrix}x_J\\y_J\end{bmatrix}\) .
Consider the matrix \( P\) with columns the column vectors \( X_{I}\) and \( X_{J}\) :
\( P=\begin{bmatrix}x_I&x_J\\y_I&y_J\end{bmatrix}\) .
Then, by definition, \( P\) is the transition matrix from the “new” basis \( B=(\overrightarrow{I},\overrightarrow{J})\) to the canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) , and and its inverse \( P^{-1}\) is the transition matrix from the canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) to the “new” basis \( B=(\overrightarrow{I},\overrightarrow{J})\) .
Proof (of the theorem 6)
Consider the canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) of the plane.
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is another basis of the plane, where:
the column vector of coordinates of \( \overrightarrow{I}\) in the canonical basis is \( X_I=\begin{bmatrix}x_I\\y_I\end{bmatrix}\) ,
and the column vector of coordinates of \( \overrightarrow{J}\) in the canonical basis is \( X_J=\begin{bmatrix}x_J\\y_J\end{bmatrix}\) .
Then \( \overrightarrow{I}=x_I\overrightarrow{i}+y_I\overrightarrow{j}\) and \( \overrightarrow{J}=x_J\overrightarrow{i}+y_J\overrightarrow{j}\) .
Consider the matrix \( P\) with columns the column vectors \( X_{I}\) and \( X_{J}\) :
\( P=\begin{bmatrix}x_I&x_J\\y_I&y_J\end{bmatrix}\) .
Then, as \( B\) is a basis of the plane, \( P\) is invertible.
Assume that \( \overrightarrow{u}\in\mathbb{P}\) is a vector such that:
its column vector of coordinates in the canonical basis is \( [\overrightarrow{u}]_{B_0}=X=\begin{bmatrix}x_1\\x_2\end{bmatrix}\) ,
and its column vector of coordinates in the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) is \( [\overrightarrow{u}]_{B}=Y=\begin{bmatrix}y_1\\y_2\end{bmatrix}\) .
Then \( \overrightarrow{u}=x_1\overrightarrow{i}+x_2\overrightarrow{j}\) and \( \overrightarrow{u}=y_1\overrightarrow{I}+y_2\overrightarrow{J}\) .
This implies that:
\( \overrightarrow{u}=y_1(x_I\overrightarrow{i}+y_I\overrightarrow{j}) +y_2(x_J\overrightarrow{i}+y_J\overrightarrow{j}) =(y_{1}x_{I}+y_{2}x_{J})\overrightarrow{i}+(y_{1}y_{I}+y_{2}y_{J})\overrightarrow{j}\) .
Consequently,
\( X=\begin{bmatrix}x_1\\x_2\end{bmatrix}=\begin{bmatrix}x_{I}y_{1}+x_{J}y_{2}\\y_{I}y_{1}+y_{J}y_{2}\end{bmatrix} =PY\) , so that \( Y=P^{-1}X\) .
Let’s generalize that to any two basis.
Consider the following three bases of the plane.
Assume that \( \overrightarrow{u}\in\mathbb{P}\) is a vector such that:
Then the following equalities hold.
That’s why we say that:
Moreover, the columns of the transition matrix \( P\) are the column vectors corresponding to the coordinates of the vectors \( \overrightarrow{i_2}\) and \( \overrightarrow{j_2}\) of the new basis \( B_{2}\) , in the old basis \( B_{1}\) .
Proof (of the last assertion)
Consider the following three bases of the plane.
Consider the transition matrix \( P=P_1^{-1}P_2\) from the “new” basis \( B_2=(\overrightarrow{i}_2,\overrightarrow{j}_2)\) to the “old” basis \( B_1=(\overrightarrow{i}_1,\overrightarrow{j}_1)\) .
Let’s denote it \( P=\begin{bmatrix} a&b\\c&d \end{bmatrix}\) .
Then the column vector of coordinates of \( \overrightarrow{i}_2\) in the basis \( B_{1}\) is
\( [\overrightarrow{i_{2}}]_{B_1}=P[\overrightarrow{i_{2}}]_{B_2} =\begin{bmatrix} a&b\\c&d \end{bmatrix}\begin{bmatrix} 1\\0 \end{bmatrix} =\begin{bmatrix} a\\c \end{bmatrix}\) ,
the first column of the matrix \( P\) .
And the column vector of coordinates of \( \overrightarrow{j}_2\) in the basis \( B_{1}\) is
\( [\overrightarrow{j_{2}}]_{B_1}=P[\overrightarrow{j_{2}}]_{B_2} =\begin{bmatrix} a&b\\c&d \end{bmatrix}\begin{bmatrix} 0\\1 \end{bmatrix} =\begin{bmatrix} b\\d \end{bmatrix}\) ,
the second column of the matrix \( P\) .
We shall now use the transition matrix and its inverse to transform the matrix of a linear mapping in some base to that matrix in another base.
Definition 5
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis of the plane \( \mathbb{P}\) .
Assume that \( f:\;\mathbb{P}\;\rightarrow\;\mathbb{P}\) is a linear mapping in the plane, and consider the matrix \( A=\begin{bmatrix} a_{11}&a_{12}\\a_{21}&a_{22} \end{bmatrix}\) such that:
Then the matrix \( A\) is called the matrix of the linear mapping \( f\) in the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) .
Theorem 7
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis of the plane \( \mathbb{P}\) .
Assume that \( f:\;\mathbb{P}\;\rightarrow\;\mathbb{P}\) is a linear mapping in the plane, and consider the matrix \( A\) of \( f\) in the basis \( B\) .
Assume that \( \overrightarrow{u}\in\mathbb{P}\) is a vector, and consider the column vectors of coordinates \( X=[\overrightarrow{u}]_B\) and \( Y=[f(\overrightarrow{u})]_B\) .
Then we have \( Y=AX\) .
That’s why the matrix \( A\) is called the matrix of the linear mapping \( f\) in the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) .
Proof (of the theorem 7)
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis of the plane \( \mathbb{P}\) .
Assume that \( f:\;\mathbb{P}\;\rightarrow\;\mathbb{P}\) is a linear mapping in the plane, and consider the matrix \( A\) of \( f\) in the basis \( B\) .
Assume that \( \overrightarrow{u}\in\mathbb{P}\) is a vector, and consider the column vectors of coordinates \( [\overrightarrow{u}]_B=X=\begin{bmatrix}x_1\\x_2 \end{bmatrix}\) and \( [f(\overrightarrow{u})]_B=Y=\begin{bmatrix}y_1\\y_2 \end{bmatrix}\) .
Then \( \overrightarrow{u}=x_{1}\overrightarrow{I}+x_{2}\overrightarrow{J}\) .
As \( f\) is a linear mapping, we have:
\( f(\overrightarrow{u})=f(x_{1}\overrightarrow{I}+x_{2}\overrightarrow{J}) =x_{1}f(\overrightarrow{I})+x_{2}f(\overrightarrow{J})\) .
Consequenly, with the column vectors of coordinates:
\( Y=x_{1}C_{1}+x_{2}C_{2} =x_{1}\begin{bmatrix} a_{11}\\a_{21} \end{bmatrix} +x_{2}\begin{bmatrix} a_{12}\\a_{22} \end{bmatrix} =\begin{bmatrix} x_{1}a_{11}+x_{2}a_{12}\\x_{1}a_{21}+x_{2}a_{22} \end{bmatrix}\)
\( =\begin{bmatrix} a_{11}&a_{12}\\a_{21}&a_{22} \end{bmatrix} \begin{bmatrix}x_1\\x_2 \end{bmatrix}=AX\) .
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis of the plane \( \mathbb{P}\) .
Then the matrices of the following linear mappings in the basis \( B\) are the following.
The matrix of the null mapping \( o\) in the basis \( B\) is the null matrix .
This is because \( o(\overrightarrow{I})=o(\overrightarrow{J})=\overrightarrow{0}\) .
The matrix of the identity mapping \( \text{Id}_{\mathbb{P}}\) in the basis \( B\) is the identity matrix \( I=\begin{bmatrix} 1&0\\0&1 \end{bmatrix}\) .
This is because \( \text{Id}_{\mathbb{P}}(\overrightarrow{I})=\overrightarrow{I}\) and \( \text{Id}_{\mathbb{P}}(\overrightarrow{I})=\overrightarrow{I}\) .
The matrix of the homothety \( h_{\lambda}\) of factor \( \lambda\) in the basis \( B\) is the scalar matrix \( H_{\lambda}=\begin{bmatrix}\lambda&0\\0&\lambda\end{bmatrix}=\lambda I\) .
This is because \( h_{\lambda}(\overrightarrow{I})=\lambda\overrightarrow{I}\) and \( h_{\lambda}(\overrightarrow{J})=\lambda\overrightarrow{J}\) .
Assume that \( B_1=(\overrightarrow{i}_1,\overrightarrow{j}_1)\) and \( B_2=(\overrightarrow{i}_2,\overrightarrow{j}_2)\) are two bases of the plane \( \mathbb{P}\) .
Assume that \( f:\;\mathbb{P}\;\rightarrow\;\mathbb{P}\) is a linear mapping in the plane.
Consider the following matrices:
the matrix \( A_{1}\) of \( f\) in the basis \( B_{1}\) ,
the matrix \( A_{2}\) of \( f\) in the basis \( B_{2}\) ,
and the transition matrix \( P\) from the basis \( B_{2}\) to the basis \( B_{1}\) .
Assume that \( \overrightarrow{u}\in\mathbb{P}\) is a vector, with column vectors of coordinates:
\( X_{1}\) in the basis \( B_{1}\) : \( X_1=[\overrightarrow{u}]_{B_1}\) ,
\( X_{2}\) in the basis \( B_{2}\) : \( X_2=[\overrightarrow{u}]_{B_2}\)
Consider the vector \( \overrightarrow{v}=f(\overrightarrow{u})\), with column vectors of coordinates:
\( Y_{1}\) in the basis \( B_{1}\) : \( Y_1=[f(\overrightarrow{u})]_{B_1}\) ,
\( Y_{2}\) in the basis \( B_{2}\) : \( Y_2=[f(\overrightarrow{u})]_{B_2}\)
Then the following equalities hold.
\( Y_2=P^{-1}Y_1\) ,
\( Y_1=A_1X_1\) ,
\( X_1=PX_2\) ,
and \( Y_2=A_2X_2\) .
So that the following calculations may be performed.
\( Y_2=P^{-1}Y_1=P^{-1}A_1X_1=P^{-1}A_1PX_2\) .
Consequently,
\( A_2=P^{-1}A_1P\) .
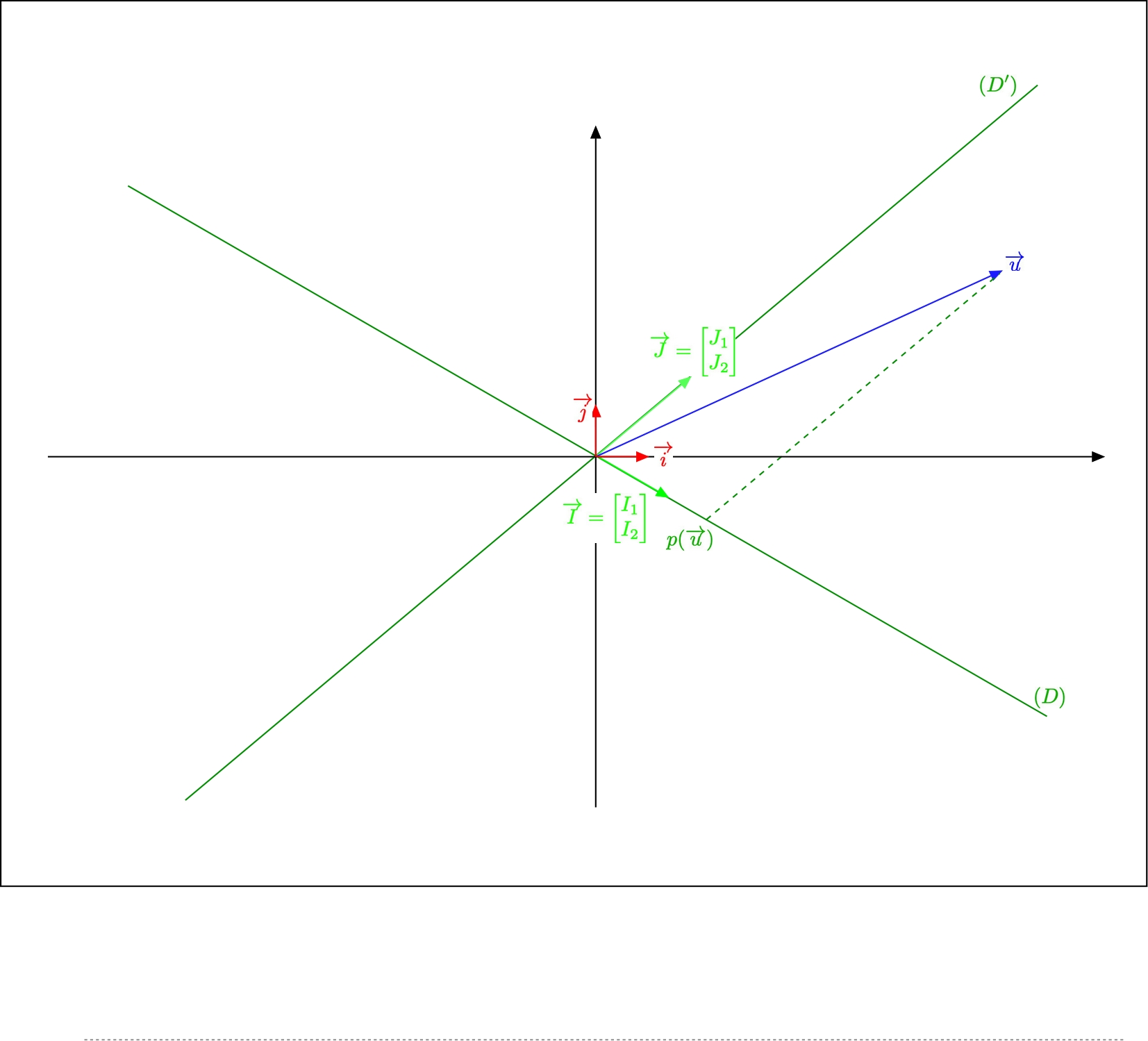
Assume that \( (D)\) and \( (D')\) are straight lines secant on the origin.
Assume that \( \overrightarrow{u}\in\mathbb{P}\) is a vector in the plane.
Then the end of the projected \( p(\overrightarrow{u})\) of the vector \( \overrightarrow{u}\) on the line \( (D)\) along the line \( (D')\) , is defined as the intersection of \( (D)\) with the parallel of \( (D')\) that passes through the end of \( \overrightarrow{u}\) .
Assume that the line \( (D)\) is directed by the vector \( \overrightarrow{I}=\begin{bmatrix} I_1\\I_2 \end{bmatrix}\) .
Assume that the line \( (D')\) is directed by the vector \( \overrightarrow{J}=\begin{bmatrix} J_1\\J_2 \end{bmatrix}\) .
Then, as the lines \( (D)\) and \( (D')\) are secant, so that the vectors \( \overrightarrow{I}\) and \( \overrightarrow{J}\) are not aligned, \( B=(\overrightarrow{I},\overrightarrow{J})\) is a basis of the plane, with transition matrix to the canonical basis \( P=\begin{bmatrix} I_1&J_1\\I_2&J_2 \end{bmatrix}\) .
The transition matrix from the canonical basis to the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) is the inverse of \( P\) : \( P^{-1}=\frac{1}{I_1J_2-I_2J_1} \begin{bmatrix} J_2&-J_1\\{-I_2}&I_1 \end{bmatrix}\) .
Consider the column vector \( X=\begin{bmatrix}x\\y\end{bmatrix}\) corresponding to the cartesian coordinates of the vector \( \overrightarrow{u}\) in the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) .
Then the column vector corresponding to the cartesian coordinates of the vector \( p(\overrightarrow{u})\) in the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) is equal to \( Y=\begin{bmatrix}x\\0\end{bmatrix}\) .
So that \( p\) is a linear mapping, with matrix in the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) equal to \( \Pi_0=\begin{bmatrix}1&0\\0&0 \end{bmatrix}\) .
Let’s denote \( \Pi\) the matrix of the projection \( p\) is the canonical basis.
Then \( \Pi_0=P^{-1}\Pi P\) , so that \( \Pi=P\Pi_0P^{-1}\) .
Let’s calculate \( \Pi\) with that formula.
\( \Pi=P\Pi_0P^{-1}\)
\( =\frac{1}{I_1J_2-I_2J_1} \begin{bmatrix} I_1&J_1\\I_2&J_2 \end{bmatrix} \begin{bmatrix}1&0\\0&0 \end{bmatrix} \begin{bmatrix} J_2&-J_1\\{-I_2}&I_1 \end{bmatrix}\)
\( =\frac{1}{I_1J_2-I_2J_1}\begin{bmatrix} I_1&0\\I_2&0 \end{bmatrix} \begin{bmatrix} J_2&-J_1\\{-I_2}&I_1 \end{bmatrix}\)
\( \Pi=\frac{1}{I_1J_2-I_2J_1}\begin{bmatrix} I_1J_2&-I_1J_1\\ I_2J_2&-I_2J_1 \end{bmatrix}\)
Assume now that the line \( (D)\) has an equation \( ax+by=0\) .
then it is directed by the vector \( \overrightarrow{I}=\begin{bmatrix}b\\{-a}\end{bmatrix}\)
Assume now that the line \( (D')\) has an equation \( cx+dy=0\) .
then it is directed by the vector \( \overrightarrow{J}=\begin{bmatrix}d\\{-c}\end{bmatrix}\)
So that, if we replace the coordonates of \( \overrightarrow{I}\) and \( \overrightarrow{J}\) , we obtain:
\( \Pi=\frac{1}{ad-bc} \begin{bmatrix} -bc&-bd\\ac&ad \end{bmatrix} =\begin{bmatrix} -\frac{bc}{ad-bc}&-\frac{bd}{ad-bc}\\ \frac{ac}{ad-bc}&\frac{ad}{ad-bc} \end{bmatrix}\)
The orthonormal bases are useful bases in the euclidean plane, for which the coordinates of any vector are simply the dot products of the vectors of the basis with that vector.
Moreover, the orthonormal bases preserve the dot product and thus the norm of vectors.
And last but not least, he matrices of rotation in the the direct orhtonormal bases tare all the same.
And last but not least, the direct orhtonormal bases the matrices of rotation.
The canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) is a direct orthonormal basis because of the following facts.
The two vectors are orthogonal to each other (\( \overrightarrow{i}\bot\overrightarrow{j}\) ), that is \( \overrightarrow{i}\cdot\overrightarrow{j}=0\) .
The two vectors are unitary: \( \left\| \overrightarrow{i} \right\|=\left\| \overrightarrow{j} \right\|=1\) .
We go from \( \overrightarrow{i}\) to \( \overrightarrow{j}\) in the direct direction, that is the counter clockwise direction: \( \widehat{(\overrightarrow{i},\overrightarrow{j})}=+\frac{\pi}{2}\) .
The basis \( B_1=(\overrightarrow{j},\overrightarrow{i})\) is a reverse orthonormal basis because of the following facts.
The two vectors are orthogonal to each other (\( \overrightarrow{j}\bot\overrightarrow{i}\) ), that is \( \overrightarrow{j}\cdot\overrightarrow{i}=0\) .
The two vectors are unitary: \( \left\| \overrightarrow{j} \right\|=\left\| \overrightarrow{i} \right\|=1\) .
We go from \( \overrightarrow{j}\) to \( \overrightarrow{i}\) in the reverse direction, that is the clockwise direction: \( \widehat{(\overrightarrow{j},\overrightarrow{i})}=-\frac{\pi}{2}\) .
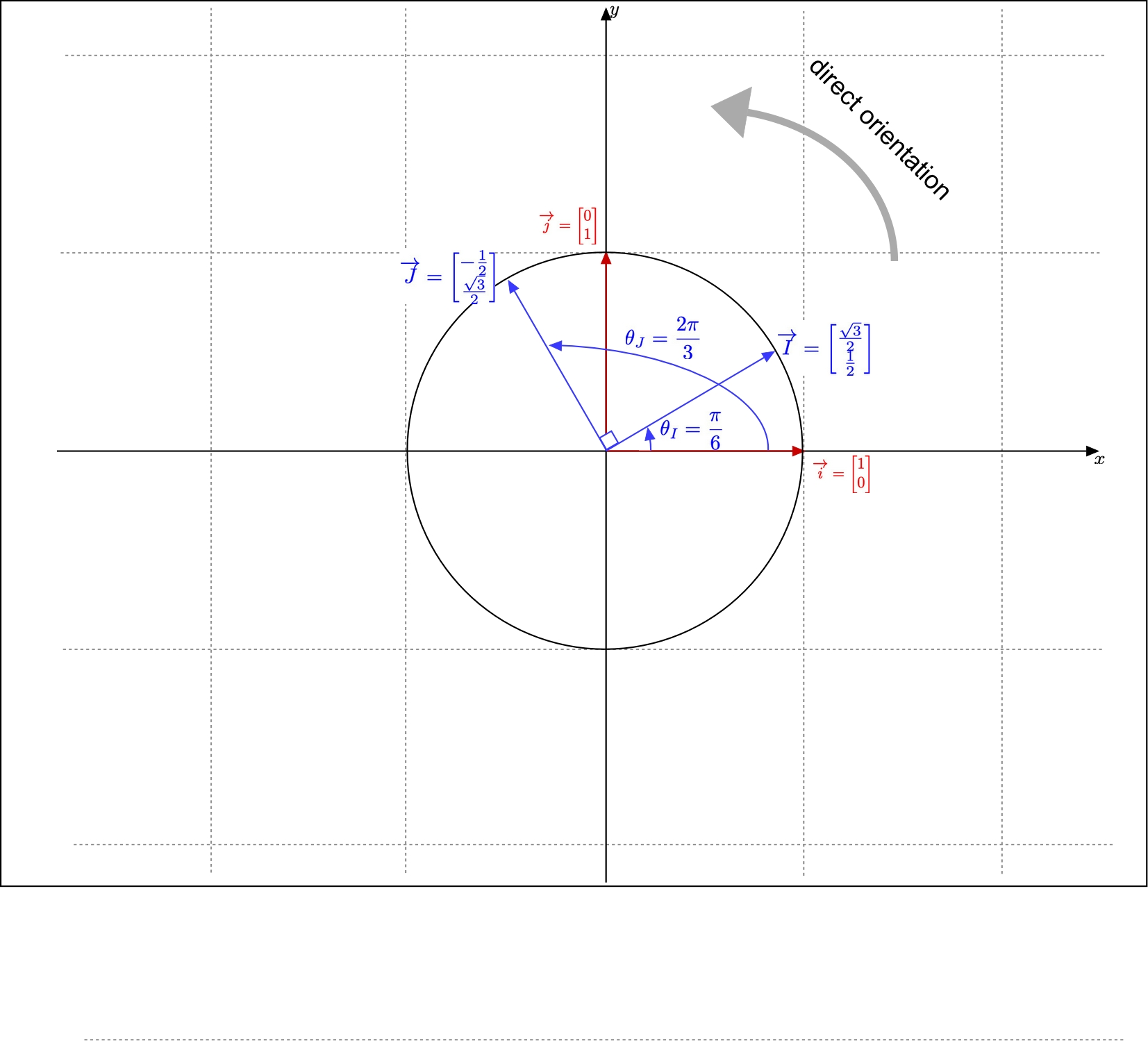
Consider the vectors \( \overrightarrow{I}=\begin{bmatrix}\frac{\sqrt{3}}{2}\\\frac{1}{2}\end{bmatrix} =\begin{bmatrix}\cos\left(\frac{\pi}{6}\right)\\\sin\left(\frac{\pi}{6}\right)\end{bmatrix}\) and \( \overrightarrow{J}=\begin{bmatrix}-\frac{1}{2}\\\frac{\sqrt{3}}{2}\end{bmatrix} =\begin{bmatrix}\cos\left(\frac{2\pi}{3}\right)\\\sin\left(\frac{2\pi}{3}\right)\end{bmatrix}\) .
Then the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) is a direct orthonormal basis because of the following facts.
The two vectors are orthogonal to each other (\( \overrightarrow{I}\bot\overrightarrow{J}\) ), because \( \overrightarrow{I}\cdot\overrightarrow{J}=0\) .
The two vectors are unitary, because \( \left\| \overrightarrow{I} \right\|=\left\| \overrightarrow{J} \right\|=1\) .
We go from \( \overrightarrow{i}\) to \( \overrightarrow{j}\) in the direct direction, because
\( \widehat{(\overrightarrow{I},\overrightarrow{J})}= \widehat{(\overrightarrow{i},\overrightarrow{J})}-\widehat{(\overrightarrow{i},\overrightarrow{I})} =\frac{2\pi}{3}-\frac{\pi}{6}=+\frac{\pi}{2}\) .
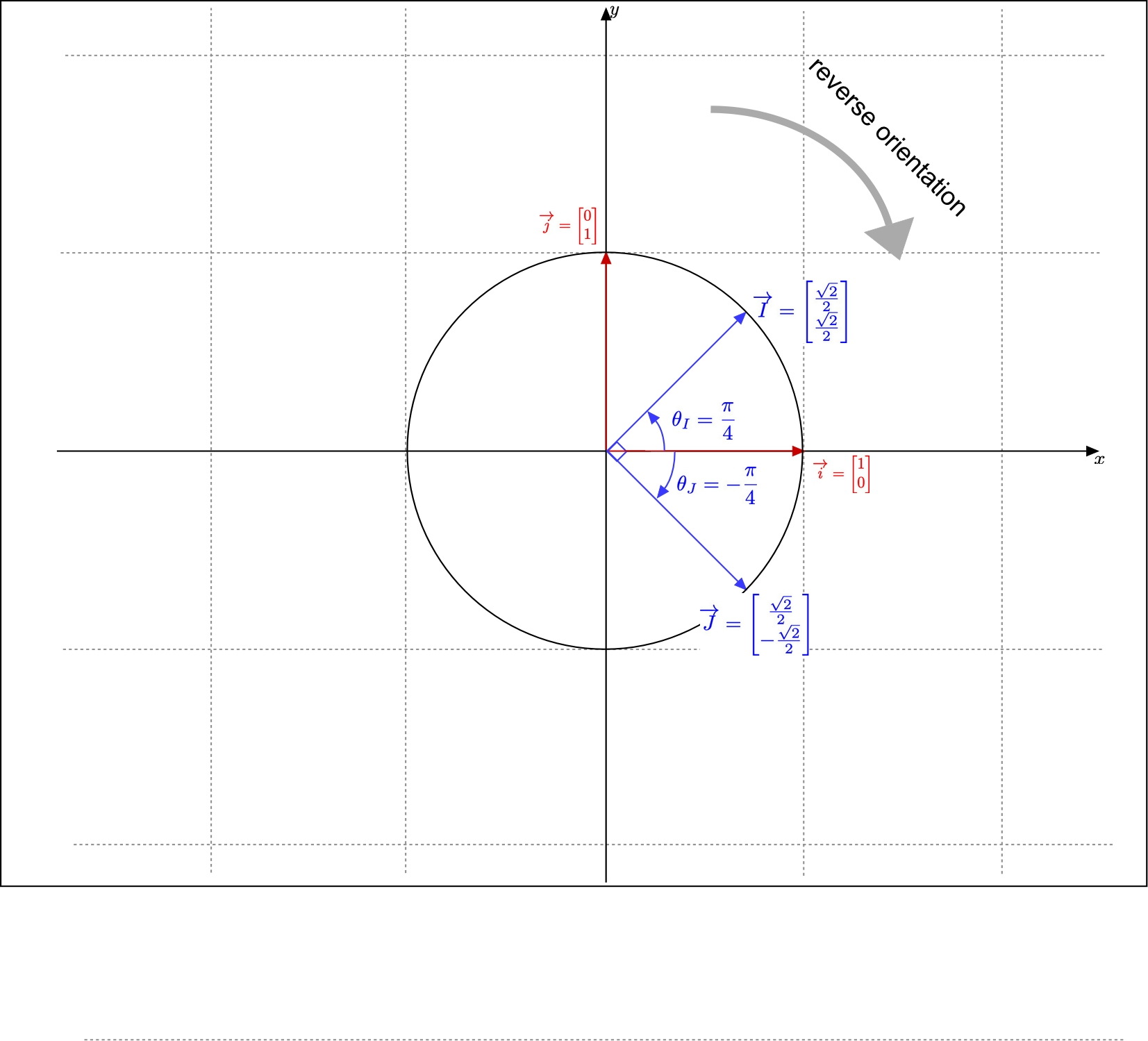
Consider the vectors \( \overrightarrow{I}=\begin{bmatrix}\frac{\sqrt{2}}{2}\\\frac{\sqrt{2}}{2}\end{bmatrix} =\begin{bmatrix}\cos\left(\frac{\pi}{4}\right)\\\sin\left(\frac{\pi}{4}\right)\end{bmatrix}\) and \( \overrightarrow{J}=\begin{bmatrix}\frac{\sqrt{2}}{2}\\{-\frac{\sqrt{2}}{2}}\end{bmatrix} =\begin{bmatrix}\cos\left(-\frac{\pi}{4}\right)\\\sin\left(-\frac{\pi}{4}\right)\end{bmatrix}\) .
Then the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) is a reverse orthonormal basis because of the following facts.
The two vectors are orthogonal to each other (\( \overrightarrow{I}\bot\overrightarrow{J}\) ), because \( \overrightarrow{I}\cdot\overrightarrow{J}=0\) .
The two vectors are unitary, because \( \left\| \overrightarrow{I} \right\|=\left\| \overrightarrow{J} \right\|=1\) .
We go from \( \overrightarrow{i}\) to \( \overrightarrow{j}\) in the reverse direction, because
\( \widehat{(\overrightarrow{I},\overrightarrow{J})}= \widehat{(\overrightarrow{i},\overrightarrow{J})}-\widehat{(\overrightarrow{i},\overrightarrow{I})} =-\frac{\pi}{4}-\frac{\pi}{4}=-\frac{\pi}{2}\) .
Definition 6
A basis \( B=(\overrightarrow{I},\overrightarrow{J})\) is said to be orthonormal if and only if the following assertions are fulfilled.
The two vectors are orthogonal to each other (\( \overrightarrow{I}\bot\overrightarrow{J}\) ), that is \( \overrightarrow{I}\cdot\overrightarrow{J}=0\) .
The two vectors are unitary, that is \( \left\| \overrightarrow{I} \right\|=\left\| \overrightarrow{J} \right\|=1\) .
Moreover, the orthonormal basis \( B=(\overrightarrow{I},\overrightarrow{J})\) is said to be:
a direct orthonormal basis if we go from \( \overrightarrow{I}\) to \( \overrightarrow{J}\) in the direct direction, that is \( \widehat{(\overrightarrow{I},\overrightarrow{J})}=+\frac{\pi}{2}\) ,
and a reverse orthonormal basis if we go from \( \overrightarrow{I}\) to \( \overrightarrow{J}\) in the reverse direction, that is \( \widehat{(\overrightarrow{I},\overrightarrow{J})}=-\frac{\pi}{2}\)
A direct consequence of these definition is the following theorem.
Theorem 8
If \( B=(\overrightarrow{I},\overrightarrow{J})\) is a direct orthonormal basis, then \( B'=(\overrightarrow{J},\overrightarrow{I})\) is a reverse orthonormal basis.
And if \( B=(\overrightarrow{I},\overrightarrow{J})\) is a reverse orthonormal basis, then \( B'=(\overrightarrow{J},\overrightarrow{I})\) is a direct orthonormal basis.
This is because \( \widehat{(\overrightarrow{J},\overrightarrow{I})} =-\widehat{(\overrightarrow{I},\overrightarrow{J})}\) .
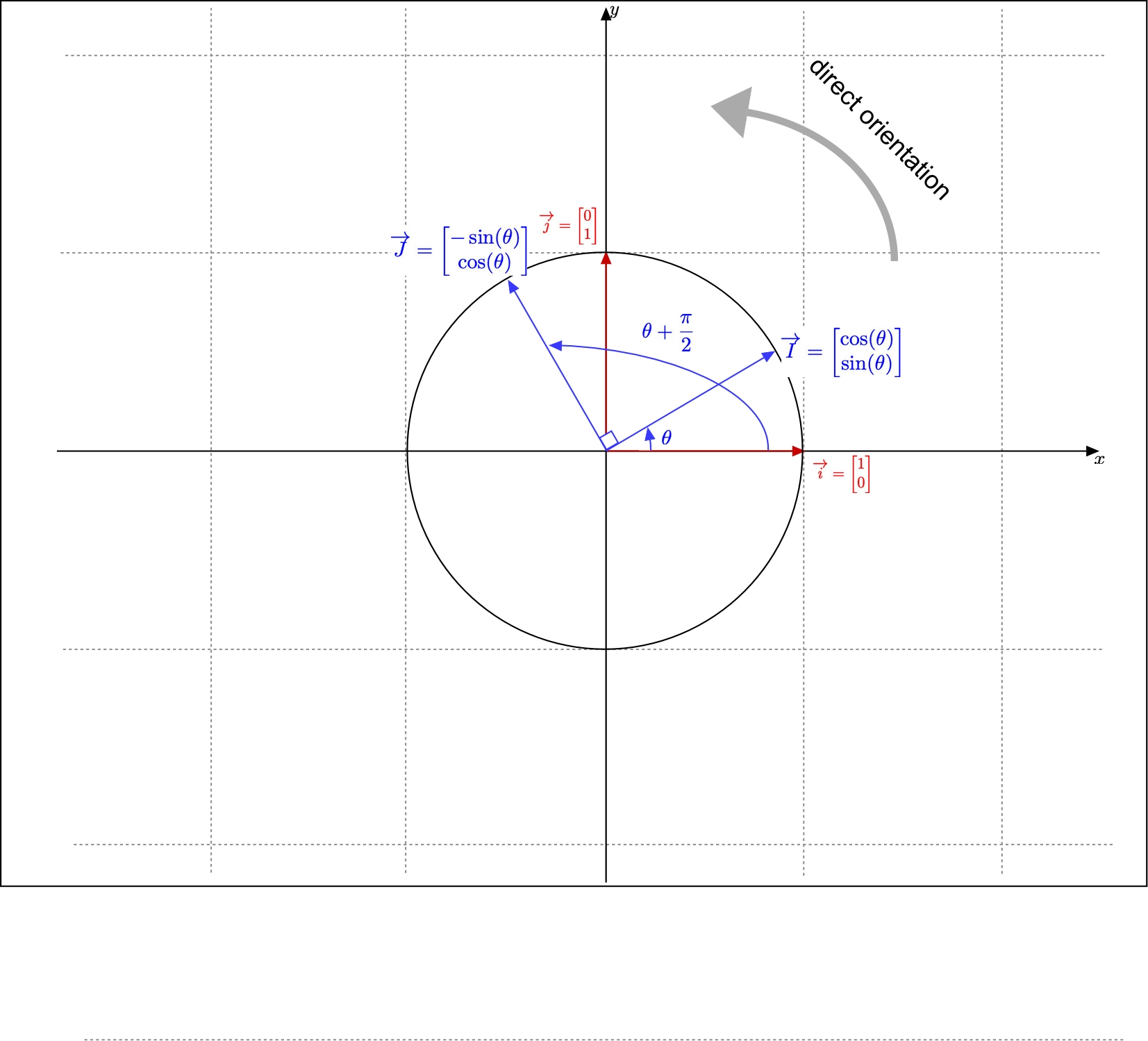
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a direct orthonormal basis and consider the angle \( \theta=\widehat{(\overrightarrow{i},\overrightarrow{I})}\) .
Then the coordinates of \( \overrightarrow{I}\) and \( \overrightarrow{J}\) in the canonical basis are the following:
\( [\overrightarrow{I}]_{B_0}=\begin{bmatrix}\cos(\theta)\\\sin(\theta)\end{bmatrix}\) ,
and \( [\overrightarrow{J}]_{B_0}=\begin{bmatrix} \cos\left(\theta+\frac{\pi}{2}\right)\\ \sin\left(\theta+\frac{\pi}{2}\right)\end{bmatrix}= \begin{bmatrix}-\sin(\theta)\\\cos(\theta)\end{bmatrix}\) .
Consequently, the following assertions are fulfilled.
The transition matrix from the basis \( B\) to the canonical basis is equal to \( P=\begin{bmatrix} \cos(\theta)&-\sin(\theta)\\ \sin(\theta)&\cos(\theta) \end{bmatrix}\) , the matrix of the rotation of angle \( \theta\) .
And the transition matrix from the canonical basis to the basis \( B\) is equal to:
\( P^{-1} =\frac{1}{\cos^{2}(\theta)+\sin^{2}(\theta)} \begin{bmatrix} \cos(\theta)&\sin(\theta)\\{-\sin(\theta)}&\cos(\theta) \end{bmatrix} =\begin{bmatrix} \cos(\theta)&\sin(\theta)\\{-\sin(\theta)}&\cos(\theta) \end{bmatrix}\)
It is the matrix of the rotation of angle \( -\theta\) .
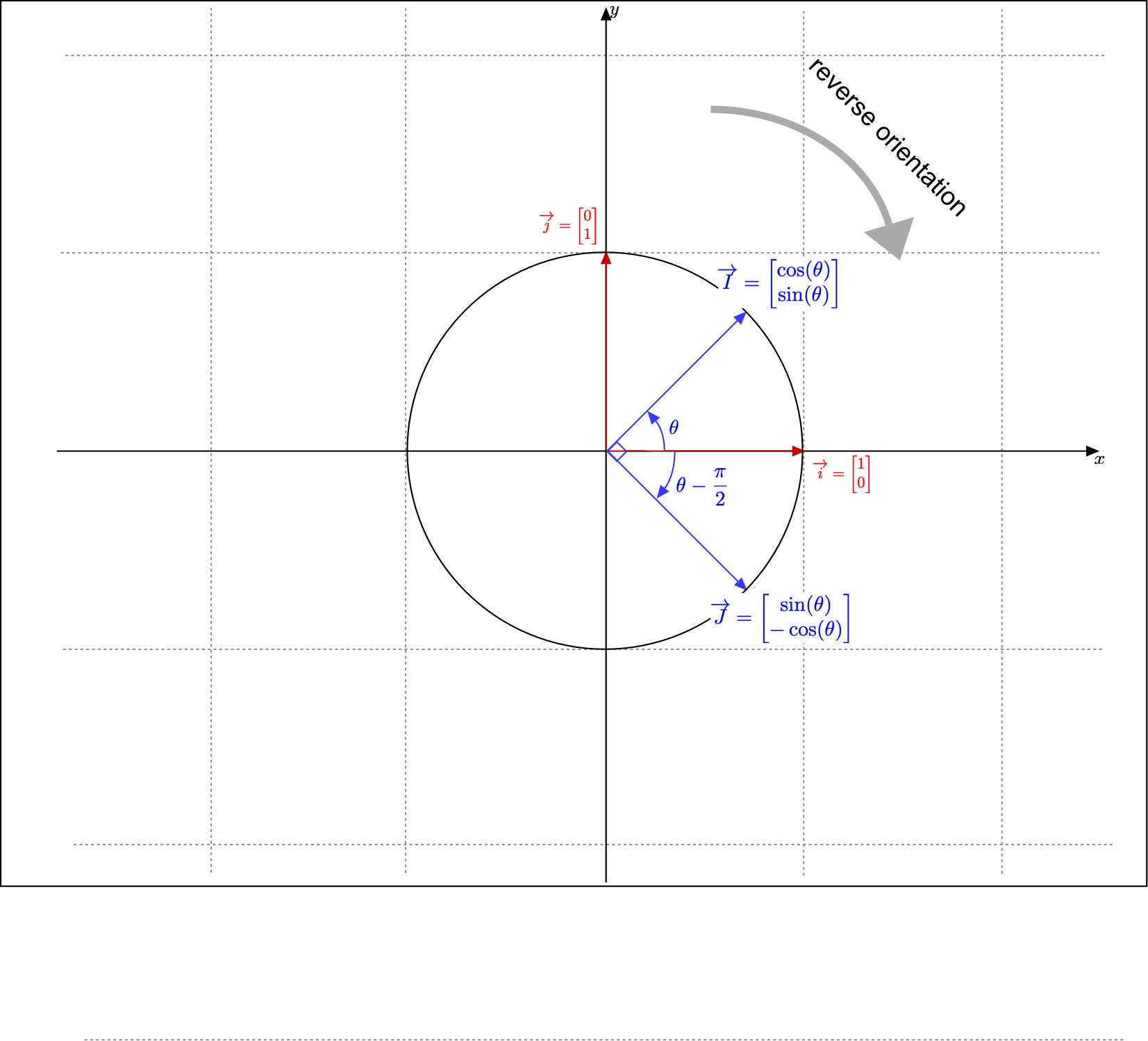
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a reverse orthonormal basis and consider the angle \( \theta=\widehat{(\overrightarrow{i},\overrightarrow{I})}\) .
Then the coordinates of \( \overrightarrow{I}\) and \( \overrightarrow{J}\) in the canonical basis are the following:
\( [\overrightarrow{I}]_{B_0}=\begin{bmatrix}\cos(\theta)\\\sin(\theta)\end{bmatrix}\) ,
and \( [\overrightarrow{J}]_{B_0}=\begin{bmatrix} \cos\left(\theta-\frac{\pi}{2}\right)\\ \sin\left(\theta-\frac{\pi}{2}\right)\end{bmatrix}= \begin{bmatrix}\sin(\theta)\\{-\cos(\theta)}\end{bmatrix}\) .
Consequently, the following assertions are fulfilled.
The transition matrix from the basis \( B\) to the canonical basis is equal to \( P=\begin{bmatrix} \cos(\theta)&\sin(\theta)\\ \sin(\theta)&-\cos(\theta) \end{bmatrix}\) .
And the transition matrix from the canonical basis to the basis \( B\) is equal to:
\( P^{-1} =\frac{1}{\cos^{2}(\theta)+\sin^{2}(\theta)} \begin{bmatrix} \cos(\theta)&\sin(\theta)\\\sin(\theta)&-\cos(\theta) \end{bmatrix} =\begin{bmatrix} \cos(\theta)&\sin(\theta)\\\sin(\theta)&-\cos(\theta) \end{bmatrix} =P\)
\( P\) is thus idempotent, and \( P^{2}=I\) the identity matrix.
Theorem 9
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is an orthonormal basis and consider the vector \( \overrightarrow{u}\in\mathbb{P}\) .
Then the coordinates of \( \overrightarrow{u}\) is the basis \( B\) are \( [\overrightarrow{u}]_B=\begin{bmatrix} \overrightarrow{I}\cdot\overrightarrow{u}\\ \overrightarrow{J}\cdot\overrightarrow{u} \end{bmatrix}\) .
Proof
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is an orthonormal basis and consider the vector \( \overrightarrow{u}\in\mathbb{P}\) .
Consider the coordinates of \( \overrightarrow{u}\) is the basis \( B\) : \( [\overrightarrow{u}]_B=\begin{bmatrix}x\\y\end{bmatrix}\) .
Then \( \overrightarrow{u}=x\overrightarrow{I}+y\overrightarrow{J}\) .
Consequently, because of the bilinearity of the dot product and the fact that \( B\) is an orthonormal basis, we have:
\( \overrightarrow{I}\cdot\overrightarrow{u} =x(\overrightarrow{I}\cdot\overrightarrow{I}) +y(\overrightarrow{I}\cdot\overrightarrow{J})=x\) and \( \overrightarrow{J}\cdot\overrightarrow{u} =x(\overrightarrow{J}\cdot\overrightarrow{I}) +y(\overrightarrow{J}\cdot\overrightarrow{J})=y\) .
Theorem 10
Consider the canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) .
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is an orthonormal basis.
Consider the vectors \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\in\mathbb{P}^2\) , with coordinates in the canonical basis and in the basis \( B\) :
\( [\overrightarrow{u}_1]_{B_0}=\begin{bmatrix}x_1\\y_1\end{bmatrix}\) and \( [\overrightarrow{u}_1]_{B}=\begin{bmatrix}x'_1\\y'_1\end{bmatrix}\) ,
and \( [\overrightarrow{u}_2]_{B_0}=\begin{bmatrix}x_2\\y_2\end{bmatrix}\) and \( [\overrightarrow{u}_2]_{B}=\begin{bmatrix}x'_2\\y'_2\end{bmatrix}\) .
Consider the dot product of \( \overrightarrow{u}_1\) and \( \overrightarrow{u}_2\) :
\( \overrightarrow{u}_1\cdot\overrightarrow{u}_2=x_1x_2+y_1y_2\)
Then we have also:
\( \overrightarrow{u}_1\cdot\overrightarrow{u}_2=x'_1x'_2+y'_1y'_2\)
Corollary 1
Consider the canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) .
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is an orthonormal basis.
Consider the vector \( \overrightarrow{u}\in\mathbb{P}\) , with coordinates in the canonical basis and in the basis \( B\) :
\( [\overrightarrow{u}]_{B_0}=\begin{bmatrix}x\\y\end{bmatrix}\) and \( [\overrightarrow{u}]_{B}=\begin{bmatrix}x'\\y'\end{bmatrix}\) ,
Consider the norm of \( \overrightarrow{u}\) and \( \overrightarrow{u}\) :
\( \left\| \overrightarrow{u}\right\|=\sqrt{x^2+y^2}\)
Then we have also:
\( \left\| \overrightarrow{u}\right\|=\sqrt{x'^2+y'^2}\)
This is because \( \left\| \overrightarrow{u}\right\|=\sqrt{\overrightarrow{u}\cdot\overrightarrow{u}}\) .
Proof (of the theorem 10)
Consider the canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) .
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is an orthonormal basis.
Consider the vectors \( (\overrightarrow{u}_1,\overrightarrow{u}_2)\in\mathbb{P}^2\) , with coordinates in the basis \( B\) :
\( [\overrightarrow{u}_1]_{B}=\begin{bmatrix}x'_1\\y'_1\end{bmatrix}\) , so that \( \overrightarrow{u}_{1}=x'_{1}\overrightarrow{I}+y'_{1}\overrightarrow{J}\) ,
and \( [\overrightarrow{u}_2]_{B}=\begin{bmatrix}x'_2\\y'_2\end{bmatrix}\) , so that \( \overrightarrow{u}_{2}=x'_{2}\overrightarrow{I}+y'_{2}\overrightarrow{J}\) .
Consequently, because of the bilinearity of the dot product and the fact that \( B\) is an orthonormal basis, we have:
\( \overrightarrow{u}_{1}\cdot\overrightarrow{u}_{2} =x'_{1}x'_{2}(\overrightarrow{I}\cdot\overrightarrow{I}) +x'_{1}y'_{2}(\overrightarrow{I}\cdot\overrightarrow{J}) +y'_{1}x'_{2}(\overrightarrow{J}\cdot\overrightarrow{I}) +y'_{1}y'_{2}(\overrightarrow{I}\cdot\overrightarrow{J})\)
\( =x'_{1}x'_{2}+y'_{1}y'_{2}\) .
We shall apply the theorem 10 to the formula \( \overrightarrow{u}\cdot\overrightarrow{v}= \left\| \overrightarrow{u} \right\| \left\| \overrightarrow{v} \right\|\cos(\theta)\) .
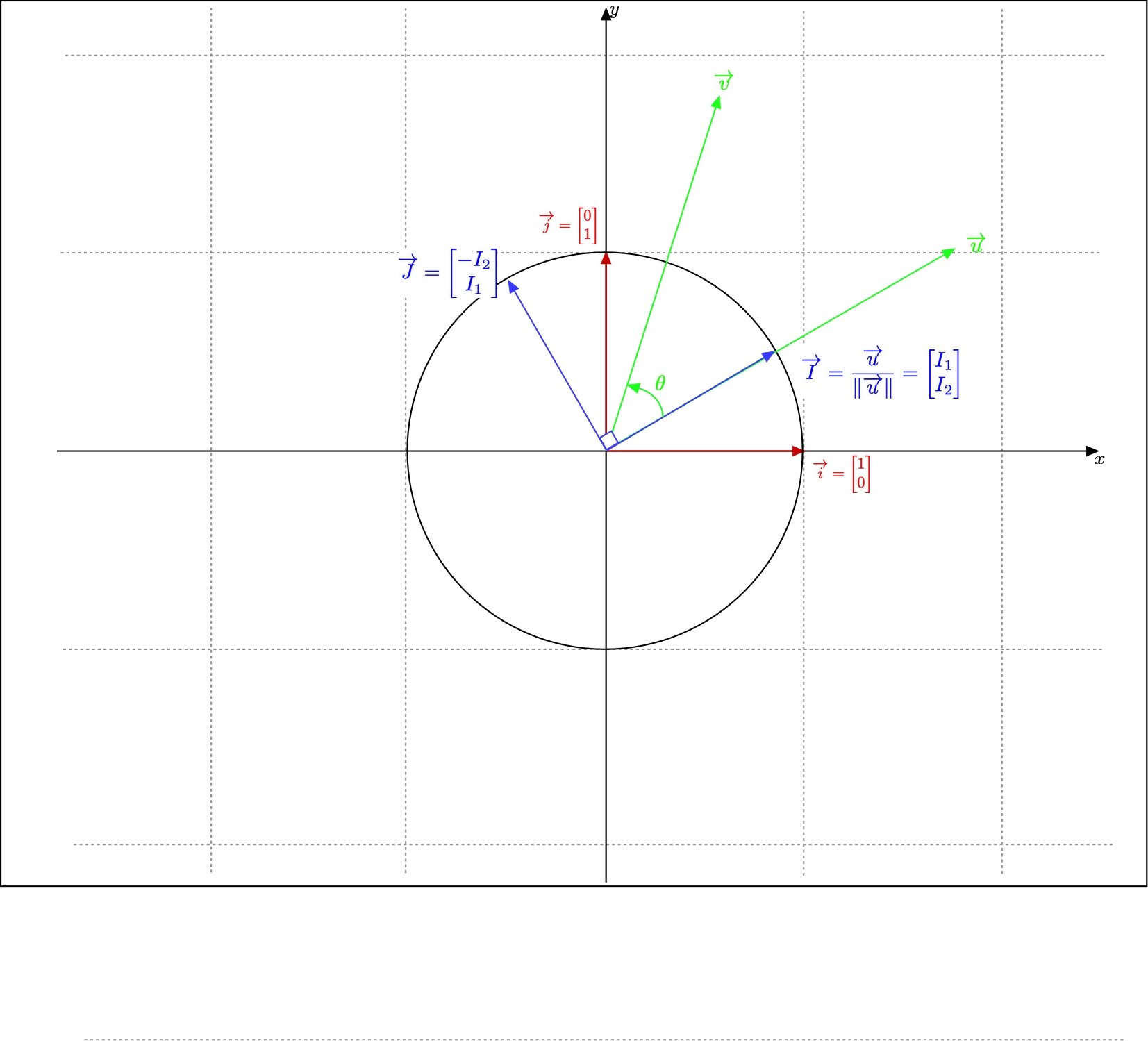
Assume that \( (\overrightarrow{u},\overrightarrow{v})\in(\mathbb{P}^*)^2\) are non zero vectors and consider their angle \( \theta=\widehat{(\overrightarrow{u},\overrightarrow{v})}\) .
Consider the orthonormal basis \( B=(\overrightarrow{I},\overrightarrow{J})\) such that:
\( \overrightarrow{I}=\frac{\overrightarrow{u}}{\left\| \overrightarrow{u} \right\|}\) ,
and, if \( \overrightarrow{I}=\begin{bmatrix}I_1\\I_2\end{bmatrix}\) , then \( \overrightarrow{J}=\begin{bmatrix}-I_2\\I_1\end{bmatrix}\) .
Then, in the basis \( B\) , we have:
\( [\overrightarrow{u}]_B=\begin{bmatrix}\left\| \overrightarrow{u} \right\|\\ \\0\end{bmatrix}\) ,
and \( [\overrightarrow{v}]_B=\begin{bmatrix} \left\| \overrightarrow{v} \right\|\cos(\theta)\\ \\ \left\| \overrightarrow{v}\right\|\sin(\theta)\end{bmatrix}\) .
Consequently, \( \overrightarrow{u}\cdot\overrightarrow{v}= \left\| \overrightarrow{u} \right\| \left\| \overrightarrow{v} \right\|\cos(\theta)\) . QED
Assume that \( \alpha\in\mathbb{R}\) is a real number, and consider the rotation \( \rho_{\alpha}\) of angle \( \alpha\) .
Then the matrix of \( \rho_{\alpha}\) in the canonical basis \( B_{0}\) is \( A_{\alpha}= \begin{bmatrix}\cos(\alpha)&-\sin(\alpha)\\ \sin(\alpha)&\cos(\alpha) \end{bmatrix}\) .
Assume that \( B=(\overrightarrow{I},\overrightarrow{J})\) is a direct orthonormal basis, and consider the angle \( \theta=\widehat{(\overrightarrow{i},\overrightarrow{I})}\) between the first vectors of the bases \( B_{0}\) and \( B\) .
Then the transition matrix from the basis \( B\) to the canonical basis \( B_{0}\) is \( P=\begin{bmatrix} \cos(\theta)&-\sin(\theta)\\\sin(\theta)&\cos(\theta) \end{bmatrix}\) , and its inverse is \( P^{-1}=\begin{bmatrix} \cos(\theta)&\sin(\theta)\\{-\sin(\theta)}&\cos(\theta) \end{bmatrix}\) .
Consequently, the matrix of \( \rho_{\alpha}\) in the basis \( B\) is equal to \( B_{\alpha}=P^{-1}A_{\alpha}P\) .
Let’s prove that \( B_{\alpha}=A_{\alpha}\) .
\( B_{\alpha}=\begin{bmatrix} \cos(\theta)&\sin(\theta)\\{-\sin(\theta)}&\cos(\theta) \end{bmatrix} \begin{bmatrix}\cos(\alpha)&{-\sin(\alpha)} \\\sin(\alpha)&\cos(\alpha) \end{bmatrix} \begin{bmatrix} \cos(\theta)&-\sin(\theta)\\\sin(\theta)&\cos(\theta) \end{bmatrix}\)
\( =\begin{bmatrix} \cos(\theta)&\sin(\theta)\\{-\sin(\theta)}&\cos(\theta) \end{bmatrix}\) \( \begin{bmatrix} \cos(\alpha)\cos(\theta)-\sin(\alpha)\sin(\theta)& -\cos(\alpha)\sin(\theta)-\sin(\alpha)\cos(\theta) \\ \sin(\alpha)\cos(\theta)+\cos(\alpha)\sin(\theta)& -\sin(\alpha)\sin(\theta) +\cos(\alpha)\cos(\theta) \end{bmatrix}\)
\( =\begin{bmatrix} \cos(\theta)&\sin(\theta)\\{-\sin(\theta)}&\cos(\theta) \end{bmatrix} \begin{bmatrix} \cos(\alpha+\theta)&-\sin(\alpha+\theta) \\ \sin(\alpha+\theta)&\cos(\alpha+\theta) \end{bmatrix}\)
\( =\begin{bmatrix} \cos(\theta)\cos(\alpha+\theta) +\sin(\theta)\sin(\alpha+\theta)& -\cos(\theta)\sin(\alpha+\theta) +\sin(\theta)\cos(\alpha+\theta) \\ -\sin(\theta)\cos(\alpha+\theta) +\cos(\theta)\sin(\alpha+\theta)& \sin(\theta)\sin(\alpha+\theta) +\cos(\theta)\cos(\alpha+\theta) \end{bmatrix}\)
\( =\begin{bmatrix} \cos(\theta-(\alpha+\theta)) & \sin(\theta-(\alpha+\theta) \\ \sin((\alpha+\theta)-\theta) & \cos(\theta-(\alpha+\theta)) \end{bmatrix}\)
\( =\begin{bmatrix}\cos(-\alpha)&\sin(-\alpha) \\\sin(\alpha)&\cos(-\alpha) \end{bmatrix} =\begin{bmatrix}\cos(\alpha)&-\sin(\alpha) \\\sin(\alpha)&\cos(\alpha) \end{bmatrix}=A_{\alpha}\) QED
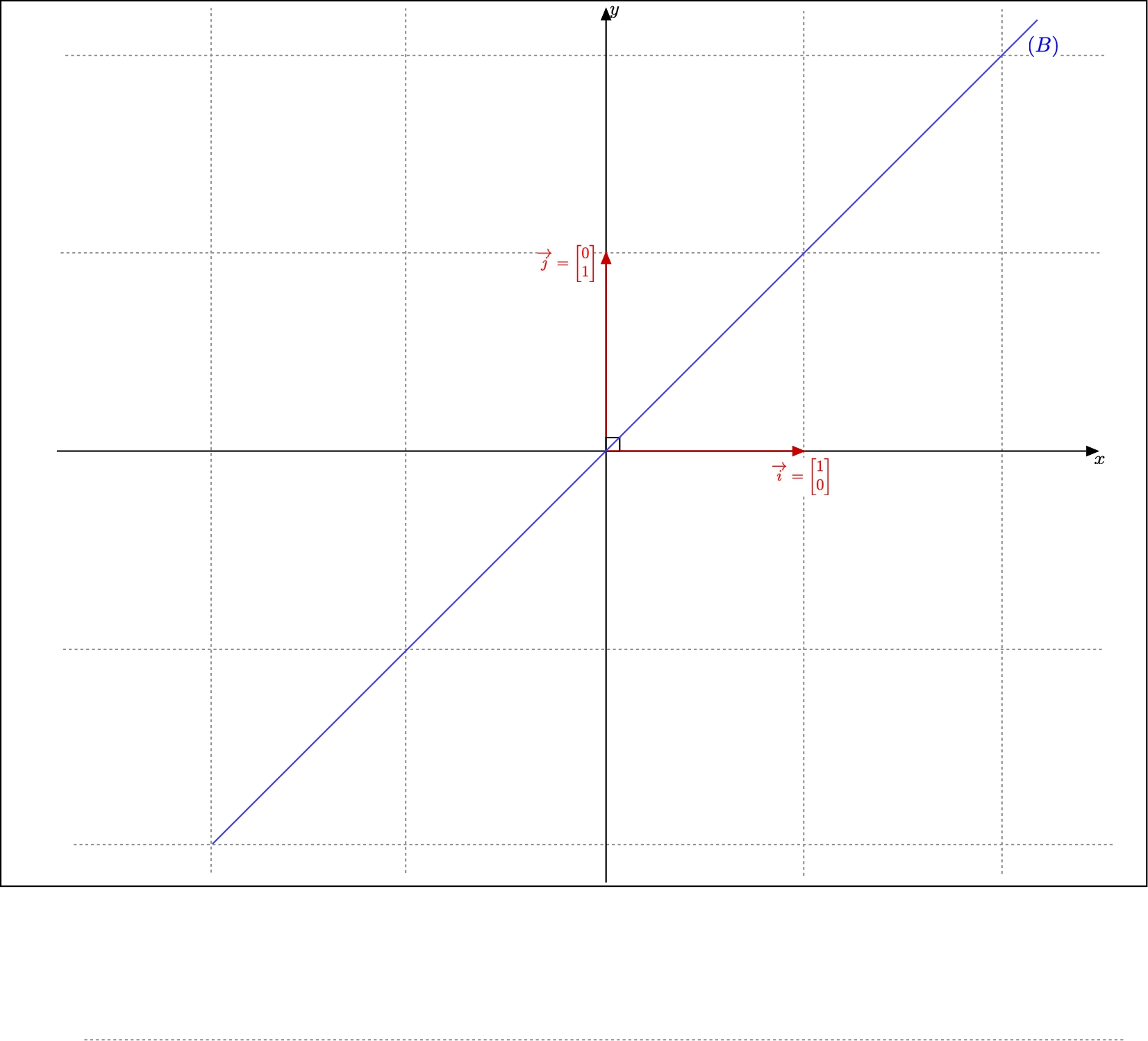
Consider the canonical basis \( B_0=(\overrightarrow{i},\overrightarrow{j})\) , and consider the bisector \( (B)\) of the axes, of equation \( y=x\) in \( B_{0}\) .
Consider the reflexion \( \sigma_0\) in the line \( (B)\) .
Then \( \sigma_0\) exchanges \( \overrightarrow{i}\) and \( \overrightarrow{j}\) .
Consequently, the matrix of \( \sigma_0\) in the canonical basis is \( S_0=\begin{bmatrix}0&1\\1&0 \end{bmatrix}\) .
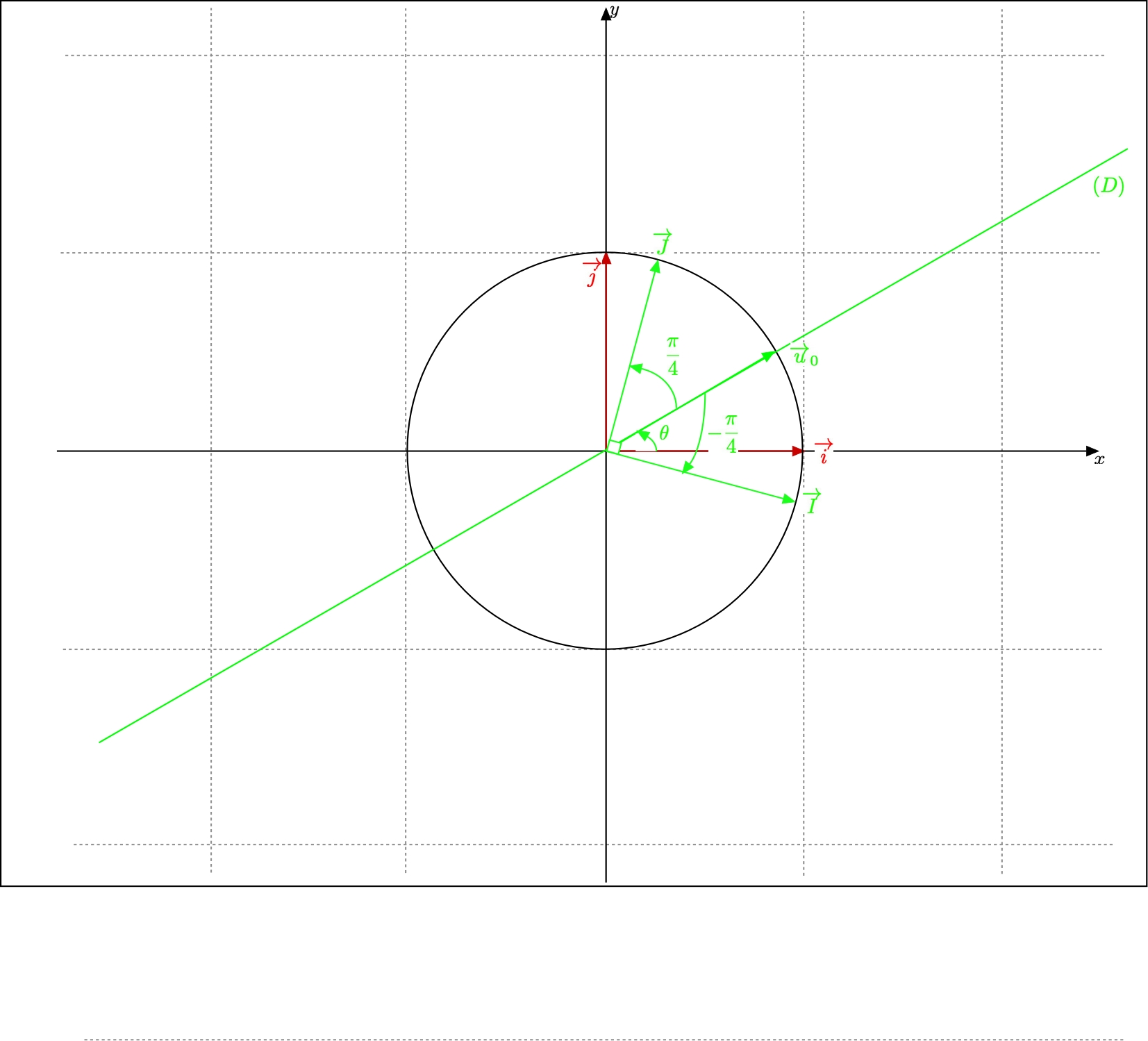
Consider the straight line \( (D)\) directed by the unit vector \( \overrightarrow{u}_0\) , of angle \( \theta\) with the vector \( \overrightarrow{i}\) .
Consider the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) where:
\( \overrightarrow{I}\) is the unit vector with angle \( \theta-\frac{\pi}{4}\) with the vector \( \overrightarrow{i}\) ,
and \( \overrightarrow{J}\) is the unit vector with angle \( \theta+\frac{\pi}{4}\) with the vector \( \overrightarrow{i}\)
Then the basis \( B=(\overrightarrow{I},\overrightarrow{J})\) is a direct orthonormal basis, and the transition matrix from the basis \( B\) to the canonical basis is \( P=\begin{bmatrix} \cos(\theta-\frac{\pi}{4})&-\sin(\theta-\frac{\pi}{4})\\ \sin(\theta-\frac{\pi}{4})&\cos(\theta-\frac{\pi}{4}) \end{bmatrix}\) , with inverse \( P^{-1}=\begin{bmatrix} \cos(\theta-\frac{\pi}{4})&\sin(\theta-\frac{\pi}{4})\\ -\sin(\theta-\frac{\pi}{4})&\cos(\theta-\frac{\pi}{4}) \end{bmatrix}\) .
Moreover, the line \( (D)\) is the bisector of the axes of the orthonormal basis \( B=(\overrightarrow{I},\overrightarrow{J})\) , and consequently the matrix, in the basis \( B\) , of the reflection \( \sigma\) in the line \( (D)\) is \( S_0=\begin{bmatrix}0&1\\1&0 \end{bmatrix}\) .
Let’s denote \( S\) the matrix in the canonical basis of the reflection \( \sigma\) in the line \( (D)\) .
Then \( S_0=P^{-1}SP\) , so that \( S=PS_0P^{-1}\) .
Let’s prove that \( S=\begin{bmatrix} -\cos(2\theta)&\sin(2\theta)\\ \sin(2\theta)&\cos(2\theta) \end{bmatrix}\) .
\( S=PS_0P^{-1}\)
\( =\begin{bmatrix} \cos(\theta-\frac{\pi}{4})&\sin(\theta-\frac{\pi}{4})\\ -\sin(\theta-\frac{\pi}{4})&\cos(\theta-\frac{\pi}{4}) \end{bmatrix} \begin{bmatrix}0&1\\1&0 \end{bmatrix} \begin{bmatrix} \cos(\theta-\frac{\pi}{4})&-\sin(\theta-\frac{\pi}{4})\\ \sin(\theta-\frac{\pi}{4})&\cos(\theta-\frac{\pi}{4}) \end{bmatrix}\)
\( =\begin{bmatrix} \cos(\theta-\frac{\pi}{4})&\sin(\theta-\frac{\pi}{4})\\ -\sin(\theta-\frac{\pi}{4})&\cos(\theta-\frac{\pi}{4}) \end{bmatrix} \begin{bmatrix} \sin(\theta-\frac{\pi}{4})&\cos(\theta-\frac{\pi}{4})\\ \cos(\theta-\frac{\pi}{4})&-\sin(\theta-\frac{\pi}{4}) \end{bmatrix}\)
Let’s denote \( \alpha=\theta-\frac{\pi}{4}\) .
Then we have:
\( S=\begin{bmatrix} \cos(\alpha)&\sin(\alpha)\\ -\sin(\alpha)&\cos(\alpha)) \end{bmatrix} \begin{bmatrix} \sin(\alpha)&\cos(\alpha)\\ \cos(\alpha)&-\sin(\alpha) \end{bmatrix}\)
\( =\begin{bmatrix} 2\cos(\alpha)\sin(\alpha)&\cos^2(\alpha)-\sin^2(\alpha)\\ \cos^2(\alpha)-\sin^2(\alpha)&-2\cos(\alpha)\sin(\alpha) \end{bmatrix}\)
\( =\begin{bmatrix} \sin(2\alpha)&\cos(2\alpha)\\ \cos(2\alpha)&-\sin(2\alpha) \end{bmatrix}\)
But \( 2\alpha=2\theta-\frac{\pi}{2}\) , so that:
\( S=\begin{bmatrix} \sin(2\theta-\frac{\pi}{2})&\cos(2\theta-\frac{\pi}{2})\\ \cos(2\theta-\frac{\pi}{2})&-\sin(2\theta-\frac{\pi}{2}) \end{bmatrix} =\begin{bmatrix} -\cos(2\theta)&\sin(2\theta)\\ \sin(2\theta)&\cos(2\theta) \end{bmatrix}\) QED
Assume now that the line \( (D)\) has equation \( ax+by=0\) .
Then it is directed by the unit vector \( \overrightarrow{u_0} =\begin{bmatrix} \frac{b}{\sqrt{a^2+b^2}}\\ -\frac{a}{\sqrt{a^2+b^2}}\end{bmatrix}\) , and the angle \( \theta\) is such that \( \overrightarrow{u_0}=\begin{bmatrix}\cos(\theta)\\\sin(\theta)\end{bmatrix}\) .
Consequently, \( \cos(\theta)=\frac{b}{\sqrt{a^2+b^2}}\) and \( \sin(\theta)=-\frac{a}{\sqrt{a^2+b^2}}\) .
But with the trigonometric formulae:
\( S=\begin{bmatrix} -\cos^2(\theta)+\sin^2(\theta)&2\sin(\theta)\cos(\theta)\\ 2\sin(\theta)\cos(\theta)&\cos^2(\theta)-\sin^2(\theta) \end{bmatrix}\) .
So that \( S=\begin{bmatrix} \frac{-{a^2+b^2}}{a^2+b^2}&\frac{2ab}{a^2+b^2}\\ \\ \frac{2ab}{a^2+b^2}&\frac{{a^2-b^2}}{a^2+b^2} \end{bmatrix}\) .
QED
The bases in the vector plane \( \mathbb{P}\) are a generalisation of the canonical basis that allow like the latter to reference the vectors with their coordinates.
Important particular cases are the orthonormal bases in the euclidean plane, in which the coordinates of any vector are easy to calculate with simple dot products.
With the matrices tool, we may calculate the coordinates of any vector of the plane in any basis given its coordinates in any other basis.
We may also calculate the matrix of a linear mapping in any basis given the matrix of that linear mapping in any other basis.
And we gave in that text some examples of application of that.